
400X80型仓库堆垛机伸缩机构及升降机构设计(含CAD图,ProE三维图)
400X80型仓库堆垛机伸缩机构及升降机构设计(含CAD图,ProE三维图)(任务书,开题报告,外文翻译,论文说明书12600字,CAD图纸1张,ProE三维图)
摘要
本次研究课题为400X80型仓库堆垛机伸缩机构和升降机构的设计。首先选择合理的机构运动实现方案和货架结构布局方案。采用双立柱巷道堆垛机,货架置于堆垛机两侧,每侧5层8个单元。每个单元格结构根据最大工件尺寸设计。根据任务书给定的已知条件,通过设计计算和校核计算确定运动机构主要部件的尺寸,伸缩机构的齿轮齿条,升降机构的螺杆螺母。确定电机,联轴器,轴承,导轨等,最后设计机座箱体的尺寸。将设计好的零部件应用Pro-E三维建模软件进行建模,其中最为典型的是齿轮的参数化设计。制作机构的各个零件图,并将建好的零件三维模型进行装配,装配过程注意连接约束方式,有刚性、销钉、滑杆等,根据不同的运动形式选择连接约束方式,最终运用三维软件的运动仿真模块实现机构模拟运动。
关键词:伸缩机构 升降机构 Pro-E三维建模
Type 400 X80 warehouse stacker telescopic mechanism and the design of lifting mechanism
ABSTRACT
This research topic is 400 x80 warehouse stacker telescopic mechanism and the design of lifting mechanism.First choose the reasonable mechanism motion scheme and shelf structure layout scheme.Adopts double pillar stacker, shelves at stacker sides, each side 5 layer 8 units.Each cell structure based on maximum pieceworker size design.According to the specification given the known conditions, through the design calculation and check calculation to determine the size of the main components of the running mechanism, telescopic mechanism of gear and rack, lifting mechanism of the screw nut. Determine the motor, coupling, bearings, guide rail, etc., the final design the size of the base cabinet. [来源:http://Doc163.com]
Apply design good parts Pro - E 3 d modeling software modeling, parametric design of one of the most typical is the gear.Every part drawing in the structure of production, and will build a good assembly parts 3 d model, assembly process, pay attention to the connection constraints such as rigidity, pin, slider, choose connection constraints according to different forms of exercise way, finally using 3 d motion simulation module of software implementation mechanism simulation exercise.
Keywords: telescopic institutions lifting mechanism Pro - E 3 d modeling
[来源:http://Doc163.com]



[资料来源:Doc163.com]



[资料来源:www.doc163.com]
目录
摘要 I
ABSTRACT II
目录 III
第一章 引言 1
1.1 自动化立体仓库的概念 1
1.1.1 自动化立体仓库的特点 1
1.1.2 自动化立体仓库的发展现状 2
1.1.3 研究自动化立体仓库的目的与意义 3
1.2 本论文要研究和解决的问题 4
1.2.1 货物单元的形式和货搁设计 4
1.2.2 堆垛机设计要点 4
第二章 总体设计 1
2.1 货架 1
2.2 堆垛机 1
2.2.1 水平方向的运动(行走机构) 2
2.2.2 货叉伸缩机构绕z轴的旋转运动(旋转机构) 2
2.2.3 垂直方向的运动(升降机构) 3
2.2.4 存取货物方向的运动(伸缩机构) 3
第三章 伸缩机构 4
3.1 伸缩机构运动实现方法 4
3.1.1 伸缩机构运动 4 [资料来源:https://www.doc163.com]
3.1.2 伸缩机构运动实现方法的选择 4
3.2 电机 4
3.3 齿轮的设计 5
3.3.1 齿根弯曲疲劳强度计算 5
3.3.2 校核齿面接触疲劳强度 7
3.4 轴的设计 8
3.5 轴承的设计 11
3.6 键的选用 12
3.7 导轨的选用 12
3.8 联轴器的选用 13
第四章 升降机构 14
4.1 升降机构运动实现方法 14
4.1.1 升降机构运动 14
4.1.2 升降机构运动实现方法选择 14
4.2 电机 14
4.3 螺旋传动副的设计 15
4.3.1 耐磨性计算 15
4.3.2 螺杆强度的验算 16
4.3.3 螺纹牙强度验算 17
4.3.4 螺杆稳定性验算 17
4.4 轴承的设计 18
4.5 联轴器的选用 19
[来源:http://Doc163.com]
4.6 导轨的选用 19
第五章 Pro-Engineer的应用 20
5.1 Pro-E简介 20
5.1.1 Pro-E的特点 20
5.1.2 Pro-E参数化建模简介 20
5.1.3 参数化建模示例 21
5.1.4 Pro-E运动与仿真简介 26
5.2 伸缩机构的三维建模 28
5.2.1 关键零件的建模 28
5.2.2 伸缩机构装配步骤 29
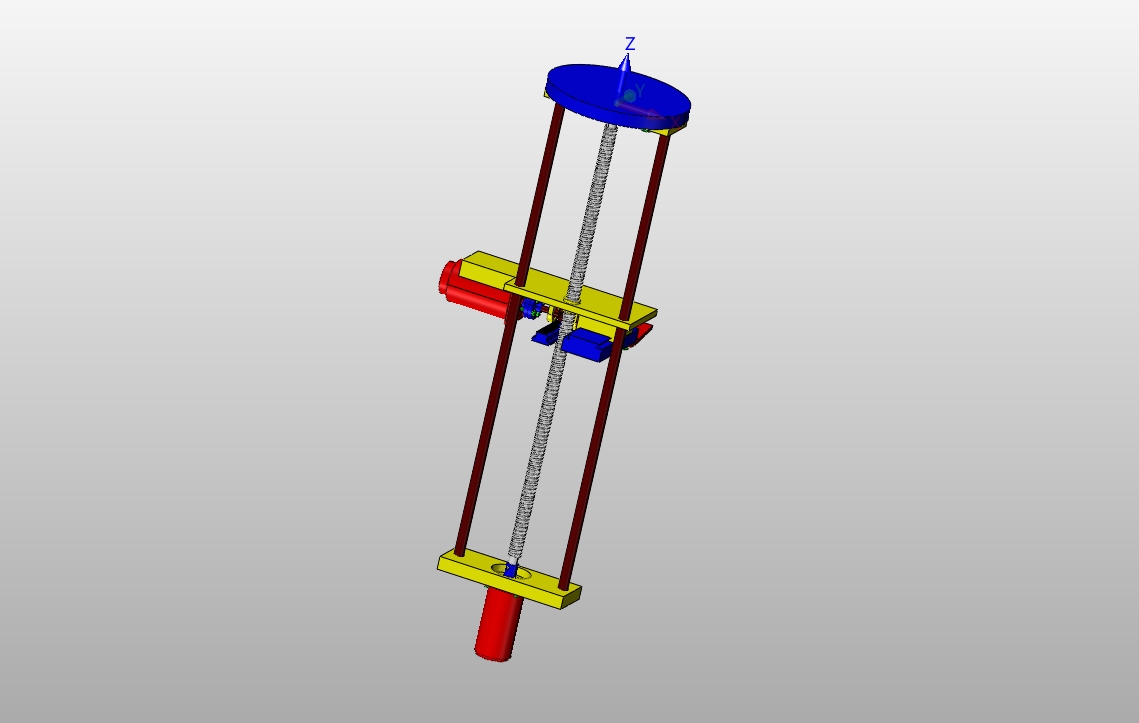
5.3 升降机构的三维建模 33
5.3.1 关键零件的建模 33
5.3.2 升降机构的装配步骤 34
5.4 伸缩机构和升降机构的总装图 38
5.5 400X80型仓库堆垛机型自动化立体仓库的装配 39
第六章 总结与展望 40
参考文献 42
致谢 44
[资料来源:http://Doc163.com]
上一篇:香烟嘴棒空腔检测系统(传送带工作台)设计(含CAD图,三维图,PLC程序)