
小型电动物流叉装车臂架系统设计(含CAD图,PROE三维图,仿真动画)
小型电动物流叉装车臂架系统设计(含CAD图,PROE三维图,仿真动画)(任务书,开题报告,文献摘要,外文翻译,论文说明书12100字,CAD图7张,PROE三维图,仿真动画)
摘要
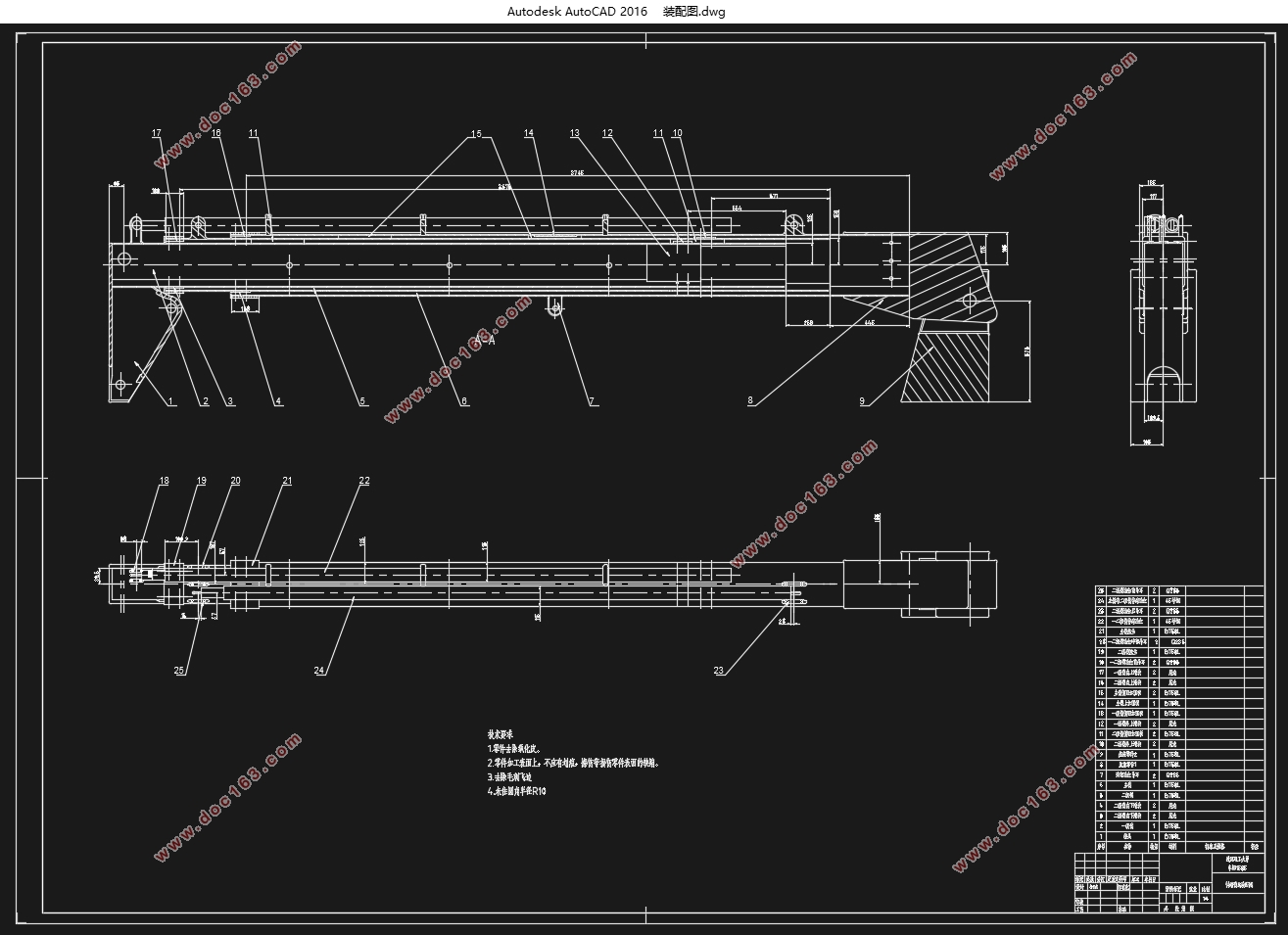
本次设计首先通过分析现有伸缩臂式叉装车的结构与功能,类比一台伸缩臂叉车,设计出一个物流叉车的伸缩臂。然后对伸缩臂进行受力分析和应力校核,检验设计合理性。接着在Pro/E5.0软件中,对伸缩臂进行建模,对每一节臂进行有限元分析,分析每级臂的应力大小和应力分布,对伸缩臂进行结构优化。最终对伸缩臂进行运动仿真,分析伸缩臂的运动情况,检验伸缩臂的运动情况。本设计主要是针对小型电动物流叉装车,设计其臂架系统,最终结合组内其他同学的设计,完成整个小型电动物流叉装车的设计。
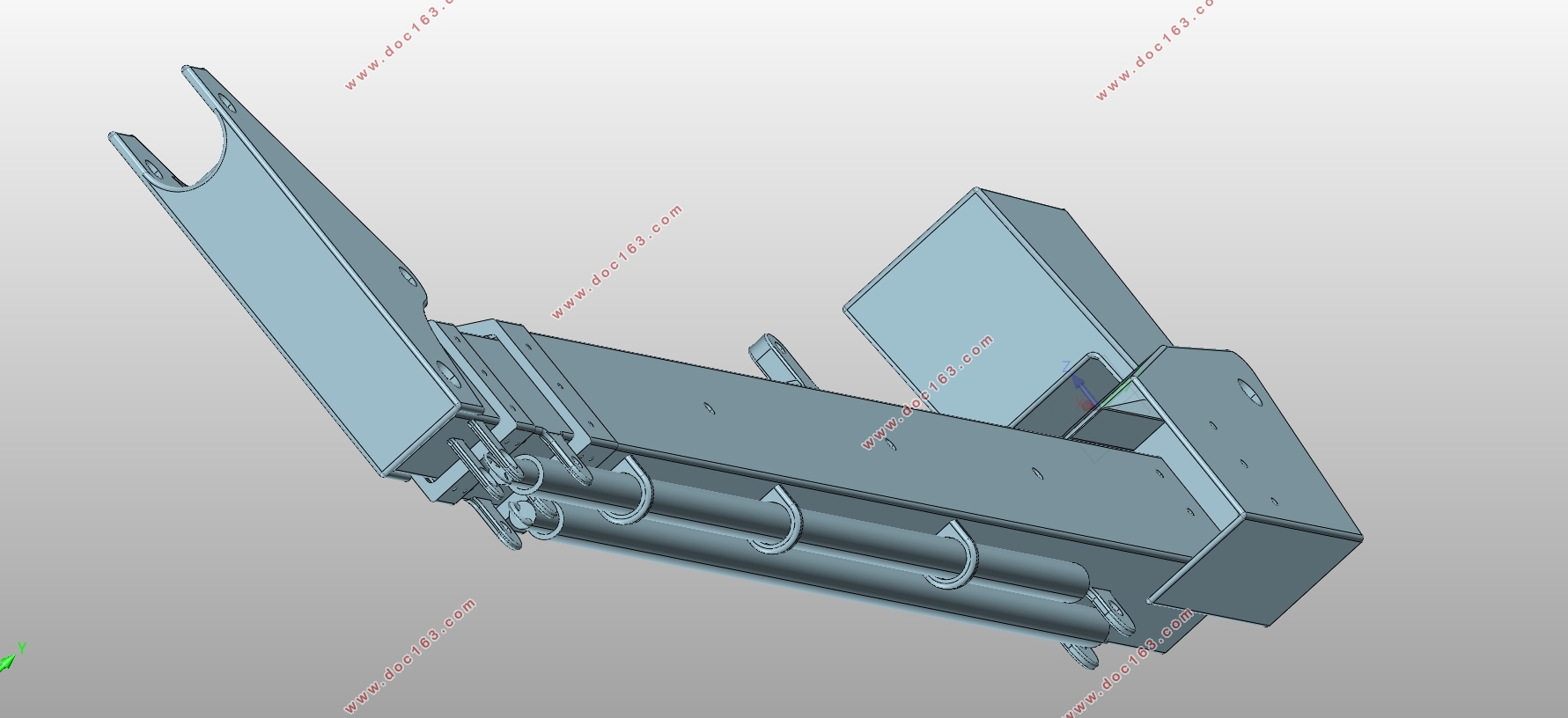
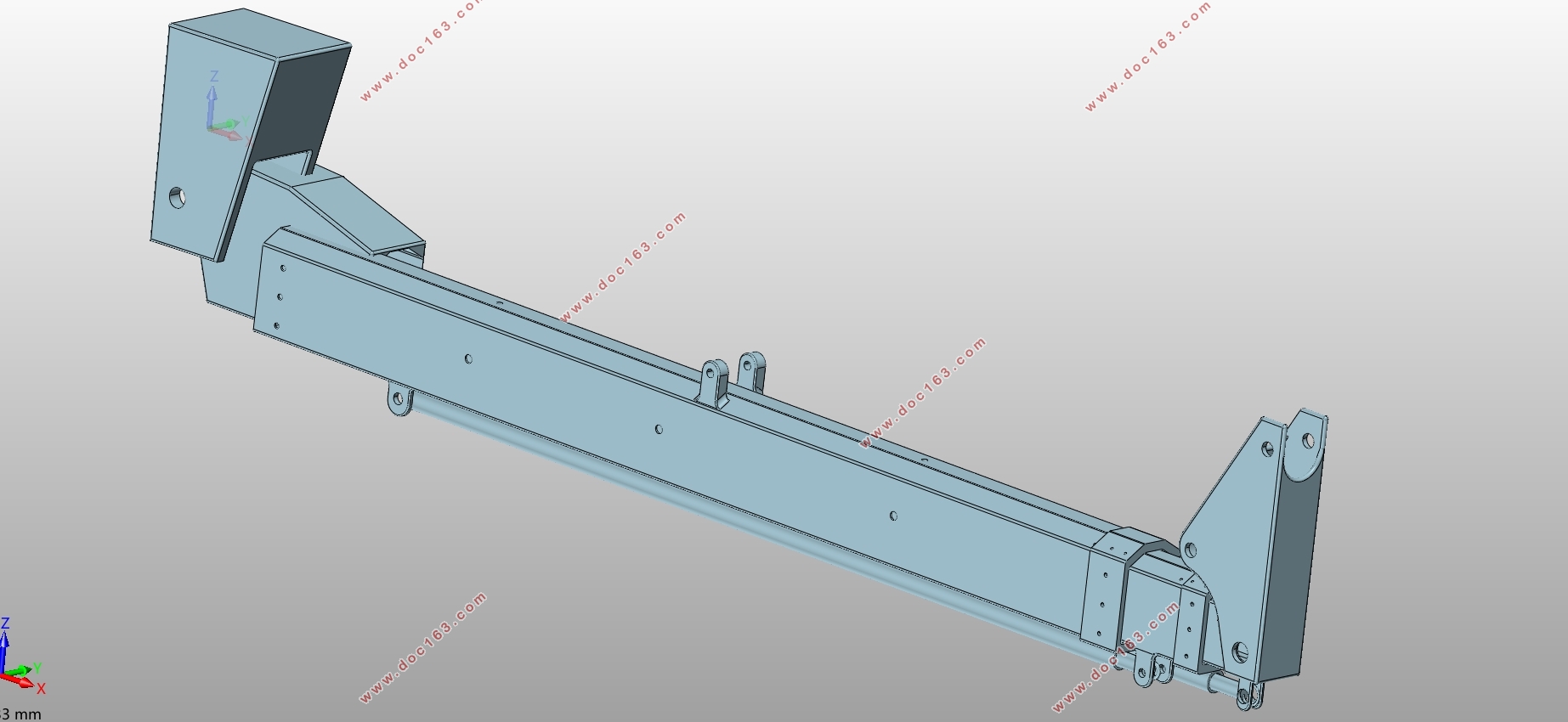
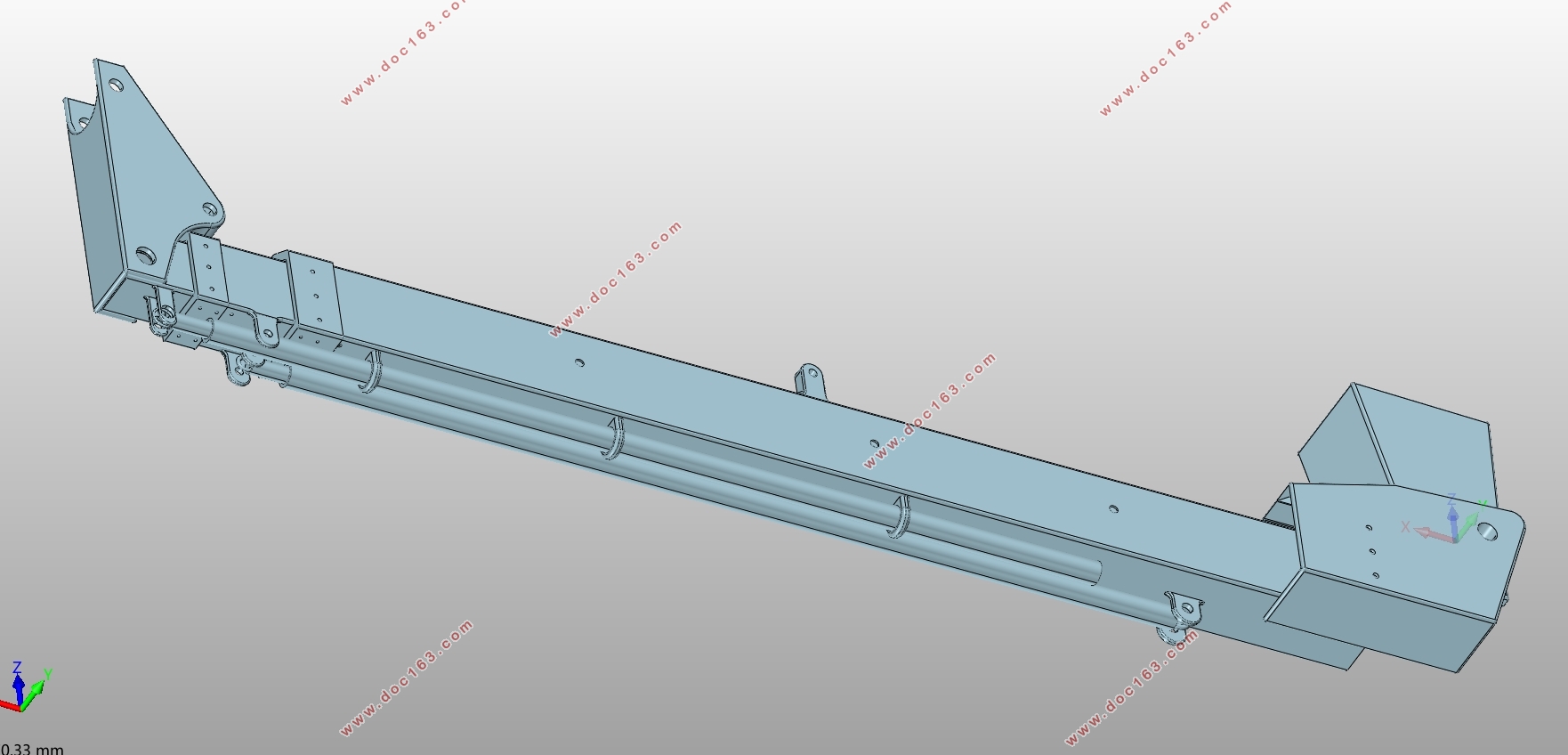
本文最终设计出一个全伸状态为10m,全缩状态为4.5m的截面形状为六边形,厚度为6mm的三节伸缩臂,经过受力分析,应力校核,有限元分析和结构改进,最终结果表明设计合格,可以达到设计要求。
关键词:伸缩臂;设计计算;三维建模;有限元分析;运动仿真;
Abstract
Firstly, by analyzing the structure and function of the existing telescopic forklifttruck, this design analogizes a telescopic forklift truck, and designs a telescopic arm of logistics forklift truck. Then the force analysis and stress checking of the telescopic arm are carried out to verify the rationality of the design. Then, in Pro/E5.0 software, the telescopic arm is modeled, the finite element analysis of each arm is carried out, the stress magnitude and distribution of each arm are analyzed, and the structure of the telescopic arm is optimized. Finally, the motion of the telescopic arm is simulated, the motion of the telescopic arm is analyzed, and the motion of the telescopic arm is checked. This design is mainly aimed at small electric logistics forklift truck,designed its boom system, and finally combined with the design of other students in the group, completed the design of the whole small electric logistics forklift truck. [资料来源:http://Doc163.com]
In this paper, a three-section telescopic boom with a full-extension state of 10m, a full-shrinkage state of 4.5m and a thickness of 6mm is designed. After stress analysis, stress checking, finite element analysis and structural improvement, the final results show that the design is qualified and can meet the design requirements.
Key Words:telescopic jib;design and calculation;3D modeling;finite element analysismotion simulation.
[来源:http://Doc163.com]



目录
第1章绪论 1
1.1 伸缩臂物流叉装车 1
1.2 伸缩臂叉车国内外现状分析 1
1.3 伸缩臂叉车未来趋势 2
1.4 课题研究内容与预期目标 3
第2章小型电动叉装车伸缩臂设计 5 [来源:http://www.doc163.com]
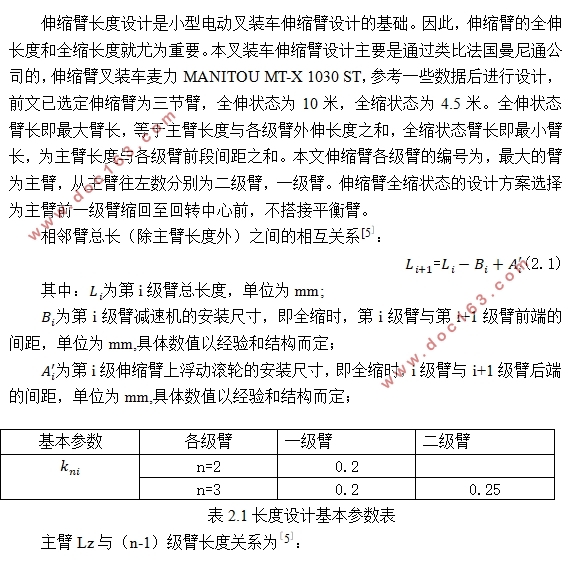
2.1 伸缩臂长度设计 5
2.2 伸缩臂截面设计 6
2.3 伸缩臂主要零部件设计 7
2.4伸缩臂质量计算 8
第3章.伸缩臂受力分析与校核 10
3.1 伸缩臂受力分析 10
3.2 伸缩臂弯曲应力校核 11
3.2.1 主臂截面:截面外六边形相关计算 11
3.2.2 二级臂截面:截面外六边形相关计算 12
3.2.3 一级臂截面:截面外六边形相关计算 12
3.2.4 伸缩臂许用应力 12
3.2.5 危险截面弯曲正应力 13
3.2.6 伸缩臂在全缩状态的受力分析 13
第4章伸缩臂建模与有限元分析 14
4.1 Pro/E介绍 14
4.2 构建伸缩臂模型 14
4.3 伸缩臂模型有限元分析 18
4.3.1 有限元分析 18
4.3.2 伸缩臂有限元分析 18
4.3.3 改进和再分析 21 [资料来源:www.doc163.com]
第5章伸缩臂运动仿真 26
5.1 运动仿真 26
5.2 伸缩臂运动仿真 26
5.2.1 Pro/E运动仿真 26
5.2.2 伸缩臂运动仿真步骤与结果 26
第6章结论与展望 31
6.1 结论 31
6.2 展望 31
参考文献 33
致谢 34 [资料来源:http://Doc163.com]
上一篇:多自由度重载液压搬运机械臂运动分析及液压驱动控制系统设计(含CAD图)
下一篇:LH7-10.5-10桥式起重机设计(含CAD零件图装配图)