
基于PLC三自由度机械手的设计(新品)
摘要 机械手在自动化领域的应用越来越广泛,与其他类型的机械手相比,具有结构简单、造价较低、维护方便、速度快等特点。它能模仿人手和臂的某些动作功能,用以按固定程序抓...
3个自由度机械手设计
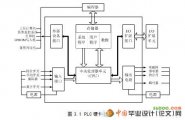
系统组成 本基械手系统由机体,传送机构,动力源和控制装置四部分组成。其中机体由小车及本体等部分组成;传送机构主要由伸缩臂及抓紧机构所组成;动力源由液压驱动和机械驱动两种形式构成控制装置主要由自动控制和手动控制两部分组成。 总体技术方案及系统...

工业机械手及控制设计(机械手设计)
工业机械手(以下简称机械手)是近代自动控制领域中出现的一项新技术,并且成为现代机械制造生产系统中的一个重要组成部分。这种新技术发展很快逐渐形成一门新兴的学科机械手工程。 机械手的组成 机械手主要由执行机构、驱动机构和控制系统三大部分组成。 驱...
基于PLC数控机床上下料机械手的设计☆
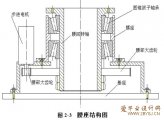
摘 要 本文是设计数控机床上下料机械手,通过查阅相关资料以及对本专业知识的学习和应用,对工业机械手各部分机械结构和功能的论述和分析,设计了一种圆柱坐标形式的数控机床上下料机械手。针对机械手的腰座、手臂、手爪等各部分机械结构以及机械手控制系统...

凸轮机械手的设计(液压系统和PLC)
摘 要 随着社会的进步,经济的发展,数控技术已经越来越重要了,而且数控技术是先进制造技术的核心,是人类进步的一个很重要的阶梯。机械手是模仿人手的动作,生产中应用机械手可以提高自动化水平和劳动生产率,可以减轻劳动强度,保证产品质量,实现安全生...
数控机床上下料机械手设计(PLC)
摘 要 通过对机械设计制造及其自动化专业大学本科四年的所学知识进行整合,对工业机械手各部分机械结构和功能的论述和分析,设计了一种圆柱坐标形式的数控机床上下料机械手。重点针对机械手的腰座、手臂、手爪等各部分机械结构以及机械手控制系统进行了详细...

工业机器人机械手的设计
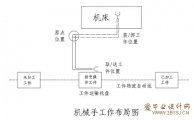
摘 要 在工业自动化生产中,无论是单机还是组合机床,以及自动生产流水线,都要用到机械手来完成工件的取放。对机械手的控制主要是位置识别、运动方向控制和物料是否存在的判别。其任务是将传送带A上的工件或物品搬运到传送带B上。机械手的上升、下移、左移...
关节式自动上下料机械手设计(PLC控制)
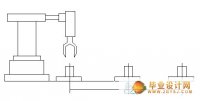
摘 要 通过对机械设计制造及其自动化专业大学本科四年的所学知识进行整合,对工业机械手各部分机械结构和功能的论述和分析,设计了一种圆柱坐标形式的关节式自动上下料机械手。重点针对机械手的腰座、手臂、手爪等各部分机械结构以及机械手控制系统进行了详...
搬动机械手PLC控制系统设计
摘要:本次设计分为机械夹持器的设计,步进电机的选择与计算和PLC程序的编写。 机械夹持器的设计首先要确定被夹持物体的质量和大...