
基于PLC三自由度机械手的设计(新品)
摘要
机械手在自动化领域的应用越来越广泛,与其他类型的机械手相比,具有结构简单、造价较低、维护方便、速度快等特点。它能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作,以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。论文就是通过应用西门子S7-200系列PLC通过编程来控制气动机械手运行的。对机械手的发展及应用做了简要介绍,并详细介绍了系统的结构、工作原理、步进电机控制和软件实现。
在考察相关实物及资料的基础上,我不仅提高了自己的学习能力而且提高了工作能力。
关键词: 机械手, PLC ,组态软件
ABSTRACT
The manipulator is used more and more widely in automatic filed. The pneumatic manipulator has the virtues such as simpleness, cheapness, the convenience of maintenance, high speed and so on compared with other manipulators. The project is through applies Siemens S7-200 the series PLC control pneumatic motor manipulator the movement. The development and application of manipulator is briefly introduced in the paper. The system component, the work principle, how to control stepper motor and how to programmable are also introduced in detail. This paper covers the development principle and method of PLC-based real-time monitoring program for automated manipulator mode. [资料来源:http://Doc163.com]
Key words: Manipulator, PLC, Configuration software.
本课题的主要任务
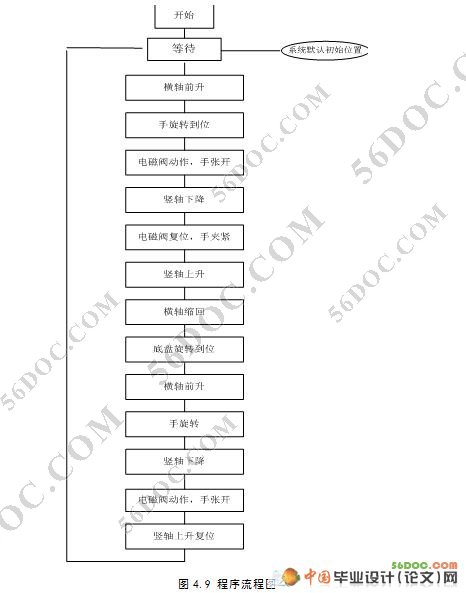
本课题的主要任务是利用现有机械手教学实物模型,通过PLC编程控制机械手实现以下的动作过程:(1)横轴前升;(2)手旋转到位;(3)电磁阀动作,手张开;(4)竖轴下降;(5)电磁阀复位,手夹紧;(6)竖轴上升;(7)横轴缩回;(8)底盘旋转到位;(9)横轴前升;(10)手旋转;(11)竖轴下降;(12)电磁阀动作,手张开;(13)竖轴上升复位。



[资料来源:http://doc163.com]
目 录 21000字
摘要 III
ABSTRACT IV
第一章 绪 论 - 1 -
1.1本课题研究的目的与意义 - 1 -
1.2本课题的主要任务 - 1 -
第二章 机械手概述 - 2 -
2.1机械手的简介 - 2 -
2.1.1 机械手 - 2 -
2.1.2 机械手的分类 - 2 -
2.2机械手的发展 - 3 -
2.2.1 气动技术及气动机械手的发展过程 - 3 -
2.2.2 气动机械手的应用现状 - 4 -
2.2.3 发展前景及方向 - 5 -
第三章 可编程序控制器 - 7 -
3.1 概述 - 7 -
3.1.1 可编程序控制器的产生及定义 - 7 -
3.1.2可编程序控制器的功能 - 7 -
3.1.3 可编程序控制器的特点 - 8 -
3.1.4 可编程序控制器的分类 - 8 -
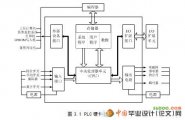
3.2 可编程序控制器的基本组成 - 9 -
[资料来源:http://Doc163.com]
3.2.1 可编程序控制器的组成 - 9 -
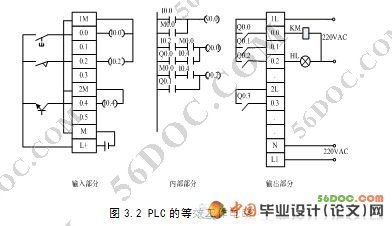
3.2.2 PLC系统的等效电路 - 11 -
3.3 可编程控制器的工作原理 - 12 -
3.3.1 PLC的工作原理 - 12 -
3.3.2 PLC对输入/输出的处理原理 - 13 -
3.3.3 PLC的编程语言 - 13 -
第四章 机械手控制系统设计 - 16 -
4.1系统硬件概述 - 16 -
4.1.1 机械手的基本结构 - 16 -
4.1.2机械手的硬件简介 - 16 -
4.2系统软件设计 - 20 -
4.2.1机械手控制要求 - 20 -
4.2.2 PLC的I/O接线图及其地址分配 - 20 -
4.2.3 PLC的程序设计 - 21 -
总结 - 26 -
参考文献 - 27 -
致谢 - 28 -
附录1 程序详单 - 29 -