
ЛљгкPLCЪ§ПиЛњДВЩЯЯТСЯЛњаЕЪжЕФЩшМЦЁю
1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.НіЙЉбЇЯАВЮПМжЎгУ.
Ум Лн БЃ АяжњжааФ
еЊ вЊ
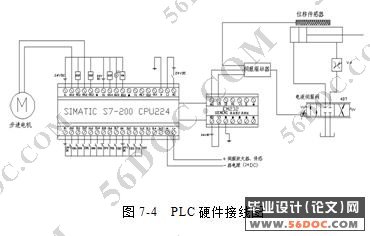
БОЮФЪЧЩшМЦЪ§ПиЛњДВЩЯЯТСЯЛњаЕЪжЃЌЭЈЙ§ВщдФЯрЙизЪСЯвдМАЖдБОзЈвЕжЊЪЖЕФбЇЯАКЭгІгУЃЌЖдЙЄвЕЛњаЕЪжИїВПЗжЛњаЕНсЙЙКЭЙІФмЕФТлЪіКЭЗжЮіЃЌЩшМЦСЫвЛжждВжљзјБъаЮЪНЕФЪ§ПиЛњДВЩЯЯТСЯЛњаЕЪжЁЃеыЖдЛњаЕЪжЕФбќзљЁЂЪжБлЁЂЪжзІЕШИїВПЗжЛњаЕНсЙЙвдМАЛњаЕЪжПижЦЯЕЭГНјааСЫЩшМЦЁЃОпЬхНјааСЫЛњаЕЪжЕФзмЬхЩшМЦЃЌбќзљНсЙЙЕФЩшМЦЃЌЛњаЕЪжЪжБлНсЙЙЕФЩшМЦЃЌЛњаЕЪжЭѓВПЕФНсЙЙЩшМЦЃЌФЉЖЫжДааЦїЃЈЪжзІЃЉЕФНсЙЙЩшМЦЃЌЛњаЕЪжЕФЛњаЕДЋЖЏЛњЙЙЕФЩшМЦЃЌЛњаЕЪжЧ§ЖЏЯЕЭГЕФЩшМЦЁЃЭЌЪБЖдвКбЙЯЕЭГКЭПижЦЯЕЭГНјааСЫРэТлЗжЮіКЭМЦЫуЁЃЛљгкPLCЖдЛњаЕЪжЕФПижЦЯЕЭГНјааСЫЩшМЦЃЌЛљБОДяЕНСЫдЄЦкЕФЩшМЦФПЕФ
ЙиМќДЪЃК ЛњаЕЪжЃЛ PLCЃЛ вКбЙЫХЗўЖЈЮЛЃЛ ЕчвКЯЕЭГ
Abstract
This article is designs on the numerically-controlled machine tool the yummy treats manipulator, through the consult correlation data as well as to this specialized knowledge's study and the application, to industry manipulator various part of mechanisms and the function elaboration and the analysis, has designed on one kind of circular cylindrical coordinate form numerically-controlled machine tool the yummy treats manipulator. In view of manipulator's waist place, the arm, the hand fingernail and so on various part of mechanisms as well as the manipulator control system have carried on the design. Has carried on manipulator's system design specifically, the waist place structure design, the manipulator arm structure design, mechanical skill department structural design, terminal actuator (hand fingernail) structural design, manipulator's mechanical drive organization design, manipulator driving system's design. Meanwhile has carried on the theoretical analysis and the computation to the hydraulic system and the control system. The control system has carried on the design based on PLC to the manipulator, has served the anticipated design purpose basically
[зЪСЯРДдДЃКhttp://doc163.com]
Keywords: ManipulatorЃЛPLCЃЛHydraulic servo controlЃЛElectrohydraulic system
ЬиЖЈЙІФмЕФЪ§ПиЛњДВЩЯЯТСЯЛњаЕЪжЕФЩшМЦЃЌФмЙЛБШНЯКУЕиЬхЯжВтПиММЪѕгывЧЦїзЈвЕБЯвЕЩњЕФРэТлбаОПЫЎЦНЃЌЪЕМљЖЏЪжФмСІвдМАзЈвЕОЋЩёКЭЬЌЖШЃЌОпгаНЯЧПЕФеыЖдадКЭУїШЗЕФЪЕЪЉФПБъЃЌФмЙЛЪЕЯжРэТлКЭЪЕМљЕФгаЛњНсКЯЁЃ
ФПЧАЃЌдкЙњФкКмЖрЙЄГЇЕФЩњВњЯпЩЯЪ§ПиЛњДВзАаЖЙЄМўШдгЩШЫЙЄЭъГЩЃЌРЭЖЏЧПЖШДѓЁЂЩњВњаЇТЪЕЭЁЃЮЊСЫЬсИпЩњВњМгЙЄЕФЙЄзїаЇТЪ,НЕЕЭГЩБО,ВЂЪЙЩњВњЯпЗЂеЙГЩЮЊШсаджЦдьЯЕЭГ,ЪЪгІЯжДњздЖЏЛЏДѓЩњВњ,еыЖдОпЬхЩњВњЙЄве,РћгУЛњЦїШЫММЪѕЃЌЩшМЦгУвЛЬЈзАаЖЛњаЕЪжДњЬцШЫЙЄЙЄзїЃЌвдЬсИпРЭЖЏЩњВњТЪЁЃ
БОДЮЩшМЦЕФаЕЪжжївЊгыЪ§ПиГЕДВЃЈЪ§ПиЯГДВЃЌМгЙЄжааФЕШЃЉзщКЯзюжеаЮГЩЩњВњЯпЃЌЪЕЯжМгЙЄЙ§ГЬЃЈЩЯСЯЁЂЯТСЯЃЉЕФздЖЏЛЏЁЂЮоШЫЛЏЁЃФПЧАЃЌЮвЙњЕФжЦдьвЕе§дкбИЫйЗЂеЙЃЌдНРДдНЖрЕФзЪН№СїЯђжЦдьвЕЃЌдНРДдНЖрЕФГЇЩЬМгШыЕНжЦдьвЕЁЃФмЙЛгІгУЕНМгЙЄЙЄГЇГЕМфЃЌТњзуЪ§ПиЛњДВвдМАМгЙЄжааФЕФМгЙЄЙ§ГЬАВзАЁЂаЖдиМгЙЄЙЄМўЕФвЊЧѓЃЌДгЖјМѕЧсЙЄШЫРЭЖЏЧПЖШЃЌНкдММгЙЄИЈжњЪБМфЃЌЬсИпЩњВњаЇТЪКЭЩњВњСІЃЌНЕЕЭЩњВњГЩБОЁЃ
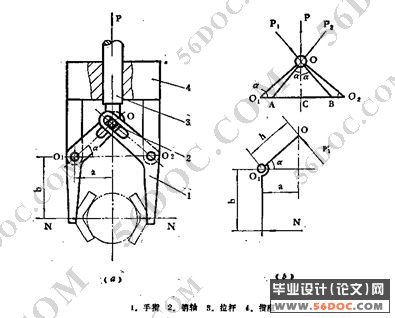
ОпЬхЕНБОЩшМЦЃЌвђЮЊЩшМЦвЊЧѓАсдЫЕФМгЙЄЙЄМўЕФжЪСПДя30KGЃЌЧвГЄЖШДя500MMЃЌЭЌЪБПМТЧЕНЪ§ПиЛњДВВМОжЕФОпЬхаЮЪНМАЖдЛњаЕЪжЕФОпЬхвЊЧѓЃЌПМТЧдкТњзуЯЕЭГЙЄвевЊЧѓЕФЧАЬсЯТЃЌОЁСПМђЛЏНсЙЙЃЌвдМѕаЁГЩБОЁЂЬсИпПЩППЖШЁЃИУЛњаЕЪждкЙЄзїжаашвЊ3жждЫЖЏ,ЦфжаЪжБлЕФЩьЫѕКЭСЂжљЩ§НЕЮЊСНИіжБЯпдЫЖЏ,СэвЛИіЮЊЪжБлЕФЛизЊдЫЖЏ,злКЯПМТЧЃЌЛњаЕЪжздгЩЖШЪ§ФПШЁЮЊ3ЃЌзјБъаЮЪНбЁдёдВжљзјБъаЮЪНЃЌМДвЛИізЊЖЏздгЩЖШСНИівЦЖЏздгЩЖШЃЌЦфЬиЕуЪЧ:НсЙЙБШНЯМђЕЅ,ЪжБлдЫЖЏЗЖЮЇДѓ,ЧвгаНЯИпЕФЖЈЮЛзМШЗЖШЁЃ [АцШЈЫљгаЃКhttp://DOC163.com]
[зЪСЯРДдДЃКhttps://www.doc163.com]

 [зЪСЯРДдДЃКhttps://www.doc163.com]
[зЪСЯРДдДЃКhttps://www.doc163.com] 

ФП ТМ 33000зж
Ек1еТ аїТл 2
1.1ЛњаЕЪжИХЪі 2
1.2 ЛњаЕЪжЕФзщГЩКЭЗжРр 3
1.3 ЙњФкЭтбаОПЯжзДКЭЧїЪЦ 10
1.4бЁЬтБГОАМАЩшМЦФПЕФ 11
1.5 Щш МЦ д дђ 13
Ек2еТ ЛњаЕЪжЕФзмЬхЩшМЦМАЩшМЦЗНАИТлжЄ 14
2.1 ЛњаЕЪжзмЬхНсЙЙЕФРраЭ 14
2.2 ЩшМЦОпЬхВЩгУЗНАИ 16
Ек3еТ ЛњаЕЪжбќзљНсЙЙЕФЩшМЦ 17
3.1 ЛњаЕЪжбќзљНсЙЙЕФЩшМЦвЊЧѓ 17
3.2 ЩшМЦОпЬхВЩгУЗНАИ 18
Ек4еТ ЛњаЕЪжЪжБлМАЪжЭѓКЭЪжВПЕФНсЙЙЩшМЦ 19
4.1 ЛњаЕЪжЪжБлЕФЩшМЦвЊЧѓ 19
4.2 ЛњаЕЪжЭѓВПЕФНсЙЙЩшМЦ 22
4.3ЛњаЕЪжФЉЖЫжДааЦїЃЈЪжзІЃЉЕФНсЙЙЩшМЦ 24
4.4ЛњаЕЪжЕФЛњаЕДЋЖЏЛњЙЙЕФЩшМЦ 27
Ек4.5Нк ЛњаЕЪжЧ§ЖЏЯЕЭГЕФЩшМЦ 32
Ек5еТ ЛњЦїШЫЪжБлЕФЦНКтЛњЙЙЩшМЦ 42
5.1ЛњЦїШЫЦНКтЛњЙЙЕФаЮЪН 42
5.2ЩшМЦОпЬхВЩгУЕФЗНАИ 43
Ек6еТ РэТлЗжЮіКЭЩшМЦМЦЫу 44
6.1ЛњаЕЪжЪжВПЩшМЦМЦЫу 44
6.2 ШЗЖЈвКбЙЯЕЭГЛљБОЗНАИ 45
6.3 ЕчЛњбЁаЭгаЙиВЮЪ§МЦЫу 57
Ек7еТ ЛњаЕЪжПижЦЯЕЭГЕФЩшМЦ 61
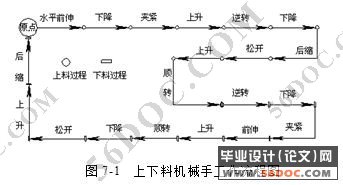
7.1ЛњаЕЪжЙЄвеЙ§ГЬгыПижЦвЊЧѓ 61
7.2ЛњаЕЪжПижЦЯЕЭГШэМўЩшМЦ 70
Нс Тл 72
ВЮПМЮФЯз 73
ЗвыВПЗж 76
гЂЮФдЮФ 76
жаЮФвыЮФ 84
жТ аЛ 89
ИНТМ1 90
Ек1еТ аїТл
ВЮПМЮФЯз
1 ИЖгРСь, Эѕбв, ХсжвВХ. ЛљгкCANзмЯпвКбЙХчЦсЛњЦїШЫПижЦЯЕЭГЩшМЦгыЪЕЯж. ЛњДВгывКбЙ. 2003, (6): 90~92
2 ЖЁгжЧр, жьаТВХ. вЛжжаТаЭаЭИжЗУцЛњвКбЙЯЕЭГЩшМЦ. ЛњДВгывК. 2003, (5): 128~129
3 СѕНЃал, КЋНЈЛЊ. ЮяСїздЖЏЛЏАсдЫЛњаЕЪжЛњЕчЯЕЭГбаОП. ЛњДВгывКбЙ. 2003, (1): 126~128
4 аьщѓ, бюеїШ№, жьУєЛЊ, ЮТЦыШЋ. PLCдкЕчвКБШР§гыЫХЗўПижЦЯЕЭГжаЕФгІгУ. ЛњДВгывКбЙ. 2003, (5): 143~144
5 КњбЇСж. ПЩБрГЬПижЦЦї(ЛљДЁЦЊ). ББОЉ: ЕчзгЙЄвЕГіАцЩч, 2003.
6 КњбЇСж. ПЩБрГЬПижЦЦї(ЪЕбЕЦЊ). ББОЉ: ЕчзгЙЄвЕГіАцЩч, 2004.
7 ЫяБј, едБѓ, ЪЉгРПЕ. ЛљгкPLCЕФЛњаЕЪжЛьКЯЧ§ЖЏПижЦ. вКбЙгыЦјЖЏ. 2005, (3): 37~39
8 ЫяБј, едБѓ, ЪЉгРПЕ. ЮяСЯАсдЫЛњаЕЪжЕФбажЦ. ЛњЕчвЛЬхЛЏ. 2005, (2): 43~45
9 ЭѕЬяУч, ГѓЮфЪЄ. ЛњЕчПижЦЛљДЁРэТлМАгІгУ. ББОЉ: ЧхЛЊДѓбЇГіАцЩч, 2003.
10 РюНЈгТ. ЛњЕчвЛЬхЛЏММЪѕ. ББОЉ: ПЦбЇГіАцЩч, 2004. [зЪСЯРДдДЃКhttps://www.doc163.com]
11 ЭѕЫяАВ, ЖХКЃЗх, ШЮЛЊ. ЛњаЕЕчзгЙЄГЬ. ББОЉ: ПЦбЇГіАцЩч,2003.
12 еХЦєСс, КЮгёАВ. PLCдкЦјЖЏПижЦГЦСПАќзАзАжУжаЕФгІгУ. вКбЙгыЦјЖЏ. 2005, (1): 31~33
13едЮФ. Ъ§зжПижЦММЪѕдкСњУХХйДВЕчПиЯЕЭГжаЕФгІгУ. ЕчЦјДЋЖЏ. 2005. 35 Оэ(3): 55~57
14 ЩђаЫШЋ, ЮтауСс. вКбЙДЋЖЏгыПижЦ. ББОЉ: ЙњЗРЙЄвЕГіАцЩч, 2005.
15 ЭѕЯмОќ, едДцгб. вКбЙДЋЖЏ. ЙўЖћБѕ: ЙўЖћБѕЙЄГЬДѓбЇГіАцЩч, 2002.
16 аьхАЕШ. ЛњаЕЩшМЦЪжВс. Ек5Оэ. ББОЉ: ЛњаЕЙЄвЕГіАцЩч, 2000.
17ГТЬњУљ, ЭѕСЌУї, ЭѕРшЧе. ЛњаЕЩшМЦ(аоЖЉАц). ЙўЖћБѕ: ЙўЖћБѕЙЄвЕДѓбЇГіАцЩч, 2003.
18 ЕЫаЧжг. ЛњЕчДЋЖЏПижЦ(ЕкШ§Ац). ЮфКК: ЛЊжаПЦММДѓбЇГіАцЩч, 2001.
19 ЮїУХзгздЖЏЛЏгыЧ§ЖЏМЏЭХ(SIEMENS AG). S7-200ЯЕЭГЪжВс. 2002.
20 ВЬааНЁ. ЩюШыЧГГіЮїУХзгS7-200 PLC. ББОЉ: ББОЉКНПеКНЬьДѓбЇГіАцЩч, 2003.
22 еХРћЦН. ЯжДњвКбЙММЪѕгІгУ220Р§. ЛЏбЇЙЄвЕГіАцЩч, 2004.
23 ИпЮїСж. ЖЭДВЩЯСЯЛњаЕЪж. ЧсЙЄЛњаЕ. 2001,ЁЁ(2): ЁЁЁЁ
24 РюДКВЈ, ЭѕДѓУї, Рюем, ЭѕзцЮТ. PLCПижЦЕФЦјЖЏЩЯЯТСЯЛњаЕЪж. вКбЙЦјЖЏгыУмЗт, 1999. 12. (6): 21~24 [РДдДЃКhttp://Doc163.com]
25 вќздШй, амЯўКь, ТцМЪЛР, ЭѕНЈРЄ. Ъ§ПиЩЯЯТСЯЛњаЕЪжЕФбаОПМАгІгУ.. 2000, (6): 3~5
26 еХВЈ, РюЮРУё, ЩаШё. ЖрЙІФмЩЯЯТСЯгУЛњаЕЪжвКбЙЯЕЭГ. 2002ЃЌ (8): 31~32
27 КювЪ, СѕЬЮ. зАаЖЛњаЕЪжЩшМЦбаОП. ЛњаЕ. 2004, Ек31Оэ (6): 53~54
28 вЖАЎЧл, дЌН№ЧП. PLCдкЛњаЕЪжПижЦЯЕЭГжаЕФгІгУ. АВЛеММЪѕЪІЗЖбЇдКбЇБЈ. 2001, 15Оэ(4): 64ЁЋ65
29 ЭѕЛсЯу, ЫяШЋгБ. здЖЏЭПНКЛњаЕЪжЕФPLCПижЦ. ЙўЖћБѕРэЙЄДѓбЇбЇБЈ. 2002ЃЌ7Оэ(5): 16~18
ЩЯвЛЦЊЃКT6113ЮдЪНялДВЕчЦјПижЦЯЕЭГЕФЩшМЦ(PLC)
ЯТвЛЦЊЃКНКДјдЫЪфЛњНКДјЫКСбБЃЛЄЩшМЦ(ОЋЦЗ)Ёю