
凸轮机械手的设计(液压系统和PLC)

资料介绍:
摘 要
随着社会的进步,经济的发展,数控技术已经越来越重要了,而且数控技术是先进制造技术的核心,是人类进步的一个很重要的阶梯。机械手是模仿人手的动作,生产中应用机械手可以提高自动化水平和劳动生产率,可以减轻劳动强度,保证产品质量,实现安全生产,尤其在恶劣的劳动条件下,它代替人作业的意义更加重大。因此,在机械加工中得到越来越广泛的应用。
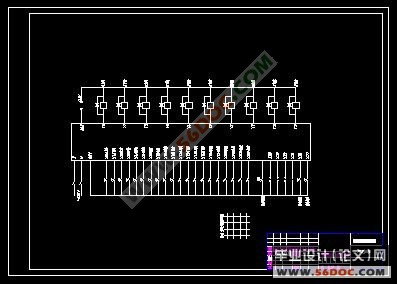
机械手是利用PLC控制整个系统实现各种运动的自动化控制,且能用于教学演示。
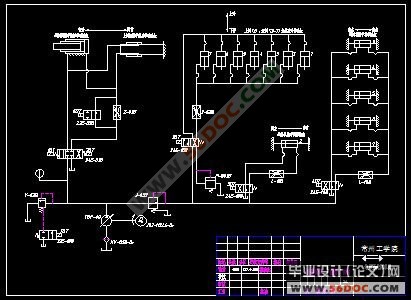
关键词:机械手,加工工艺,液压系统
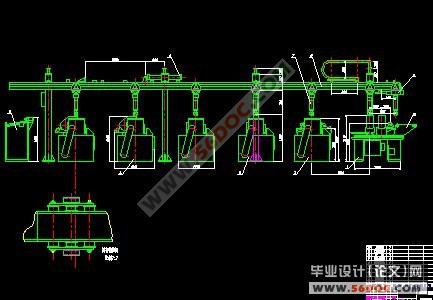
机械手是模仿人手工作的机械设备。实验用机械手的设计,是指机械手臂在一定范围内的摆动,手臂的垂直方向的上下移动及手爪的伸缩运动组成。由启动系统实现各运动的驱动。它的主要作用是将工件按预定的程序自动地搬运到需要的位置,或者保持工具进行工作。机械手是利用PLC控制整个系统实现各种运动的自动化控制,且能用于教学演示。
结构简单:设计为三自由度的机械手臂,运动形式简单,可以把手臂设计成为沿导向装置运动,直接选用标准规格的液压缸和内胀式机械手爪,无须另行设计。
外观不要有手臂堵塞外形:设计尽量要求安装方便,各非标准件加工方便。因此,不必设计成套形式,管道也不必安排在手臂内部,可以采用软管直接连接。
[资料来源:www.doc163.com]
本次设计的手臂不要光用于工业生产,因此,对各部件的加工精度及安装要求不高,可以在通用机床上加工完成。
[资料来源:http://doc163.com]
目 录 9000字
第一章 前 言 5
[资料来源:Doc163.com]
1.1 机械手的用途说明 5
1.2 机械手的目的、意义 5
1.3 设计的指导思想,应达到的技术性能要求 5
第二章 设计方案论证 7
2.1 机械手设计的原始数据 7
2.1.1 组成结构 7
2.1.2 执行机构 7
2.1.3 驱动机构 7
2.1.4 控制系统 7
2.1.5 位置检测装置 8
2.2 机械手的运动方案论证 8
2.2.1 机械手的运动形式(坐标形式)确定 8
第三章 机械手各组成部件设计计算 10
3.1 抓取机械设计 10
3.1.1 抓取机械机构的基本要求 10
3.1.2 手爪夹紧力的计算 12
3.1.3 手爪的驱动装置的选择与驱动力计算 13
3.2 手腕机构 13
3.2.1 手腕的作用和动作 13
3.3 手臂设计 14
3.3.1 机械手手臂应满足的基本要求: 14
3.3.2 为满足基本要求而采取的机构、工艺性措施 14
3.3.3 手臂伸缩运动的结构设计 15
3.3.4 手臂升降运动的结构设计 17
3.3.5 手臂回转运动的结构设计 19
3.4 缓冲装置设计 20
[资料来源:Doc163.com]
3.4.1 缓冲方式的确定 20
3.5 定位机构设计 21
3.5.1 定位方式的选择确定 21
3.6 机械手驱动系统选择 22
3.6.1 驱动方式的选择 22
3.6.2 下面是液动与气动方式特点的比较 22
第四章 机械手控制系统设计 23
4.1 机械手的控制方式的选择 23
4.2 本控制方式的特点 23
设计总结 24