
六自由度液压运动平台的自动控制的设计(CAD,SolidWorks)
六自由度液压运动平台的自动控制的设计(CAD,SolidWorks)(含任务书,开题报告,外文翻译,毕业论文说明书19000字,CAD图纸4张,SolidWorks三维图11张)
摘 要
六自由度运动平台,由于有极为广阔的应用前景,可以完成在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态,可广泛应用到各种训练模拟器上。由于六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等等一系列高科技领域,因而六自由度运动平台的研制变成了高等院校、研究院所在液压和控制领域水平的标志性象征。
通过六自由度运动平台的机构特点及应用,可以在平台控制总体设计的基础上完成液压伺服系统的建模工作,在Matlab软件中对系统进行了仿真分析,将常规PID控制和基于神经网络算法的先进PID控制方法进行对比,仿真结果表明基于神经网络的PID控制方法对伺服系统具有良好的控制效果,同时也证明了电液伺服控制系统设计的合理性,将控制策略应用于样机平台,平台运行稳定,流畅。为平台控制的进一步改进和完善奠定了基础。 [资料来源:http://www.doc163.com]
关键词:六自由度平台;液压;PID控制
Abstract
Six degree of freedom motion platform, because there is a very broad application prospects, can be completed in the space of six degrees of freedom (X, Y, Z, alpha, beta, gamma) movement, which can simulate various spatial motion, can be widely applied to various training simulator. As the development of six degree of freedom motion platform, relates to the mechanical, hydraulic, electrical, control, computer, sensor, the spatial movement mathematical model, real-time signal transmission and processing, graphic display, dynamic simulation and so on a series of high-tech fields, so the development of six degree of freedom motion platform into colleges and universities, research institutes to hydraulic and control field level symbol.
Through the mechanism, characteristics and application of six degree of freedom motion platform, can complete the modeling of hydraulic servo system based on the general control platform design, in the Matlab software to simulate the system analysis, the conventional PID control and PID neural network algorithm based on advanced control methods were compared, the simulation results show that the PID neural network the control method has good control effect of the servo system based on, it also proved that the design of electro-hydraulic servo control system is reasonable, the control strategy is applied in the prototype platform, platform stable operation, smooth. As a platform to control the further improvement and laid the foundation for the perfection of. [资料来源:http://www.doc163.com]
Key words:6-DOF platform;hydraulic;PID control
课题主要研究内容
通过查阅资料,了解国内外多自由度运动平台的现状和发展趋势,根据相关资料设计六自由度运动平台的结构,设计与其配套的液压缸等零件。通过三维软件画出三维实体图,并通过建立模型,使用PID控制方式提高系统的运动性能,利用虚拟样机等技术对模型进行运动仿真,对其的可靠性等相关性能进行分析比较,来证明其方法的可行性。
[来源:http://Doc163.com]

 [版权所有:http://DOC163.com]
[版权所有:http://DOC163.com] 
目 录
摘要 III
ABSTRACT IV
目录 V
1 绪论 1
1.1 课题背景及意义 1
1.2 六自由度平台发展及应用 1
1.3 六自由度平台国内外研究状况 3
1.3.1 国外研究现状 3
1.3.2 国内研究现状 4
1.4 课题主要研究内容 4
2 六自由度运动平台本体结构设计 5
2.1 平台主要性能指标 5
2.2 平台结构 5
2.3 平台驱动方式 6
3 液压缸设计 7
3.1简介 7
3.2 液压缸的设计 7
3.3 液压缸的密封设计 10 [资料来源:http://doc163.com]
3.4 支承导向的设计 10
3.5 防尘圈的设计 11
3.6 液压缸材料的选用 11
3.7 液压泵的选择 12
3.8 电机的选择 14
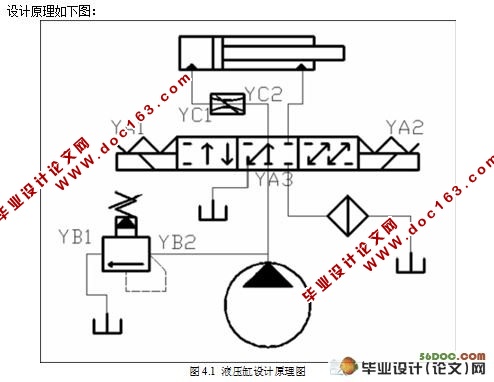
4 液压油路设计 15
4.1 液压设备外接线路 15
4.2 操作板 15
4.3 程序地址分配 16
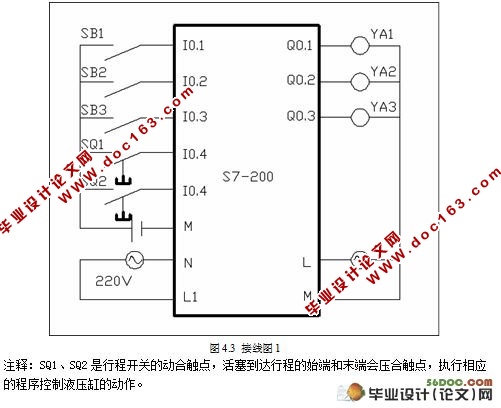
4.4 芯片接线图 17
4.5 PLC程序指令 20
5 液压伺服系统的建模与仿真 25
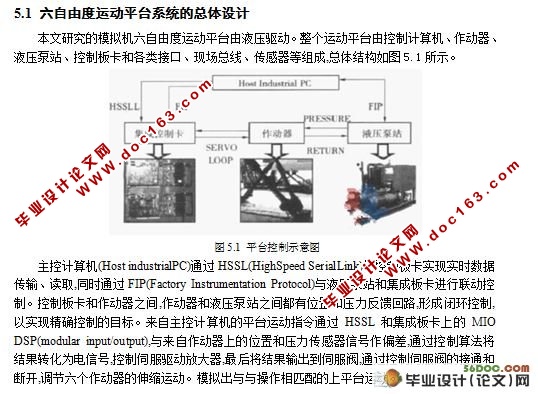
5.1 六自由度运动平台系统的总体设计 25
5.2 数学模型的建立 25
5.2.1 单个作动器的数学模型 26
5.3 系统的控制及仿真 26
5.3.1 基于常规PID的控制系统仿真研究 26
5.3.2 基于BP神经网络的控制算法 27
5.3.3 仿真实现 28
6 液压运动平台的运动仿真 30
6.1 液压平台的基本结构设计 30
[资料来源:http://Doc163.com]
6.2 虚拟样机的建立与仿真 31
6.2.1 零件建模 31
6.2.2 装配设计 32
6.2.3 运动分析 33
6.3 结束语 36
7 结论与展望 37
致谢 38
参考文献 39
[资料来源:www.doc163.com]
上一篇:基于UG平台的油缸的参数化设计
下一篇:轮心堆焊机总体方案及减速器设计