
三自由度机械手腕(5公斤负载)的设计(含CAD图)

三自由度机械手腕(5公斤负载)的设计(含CAD图)(任务书,开题报告,论文说明书10000字,CAD图5张)
摘 要
现在的制造业,由于规模较大,企业为了提高生产效率,保证产品质量,机械手成为了生产线上不可或缺的重要成员,慢慢地被广大企业所接受和认可。近几年由于工业机器人的兴起使现代工业的状况得到改善。
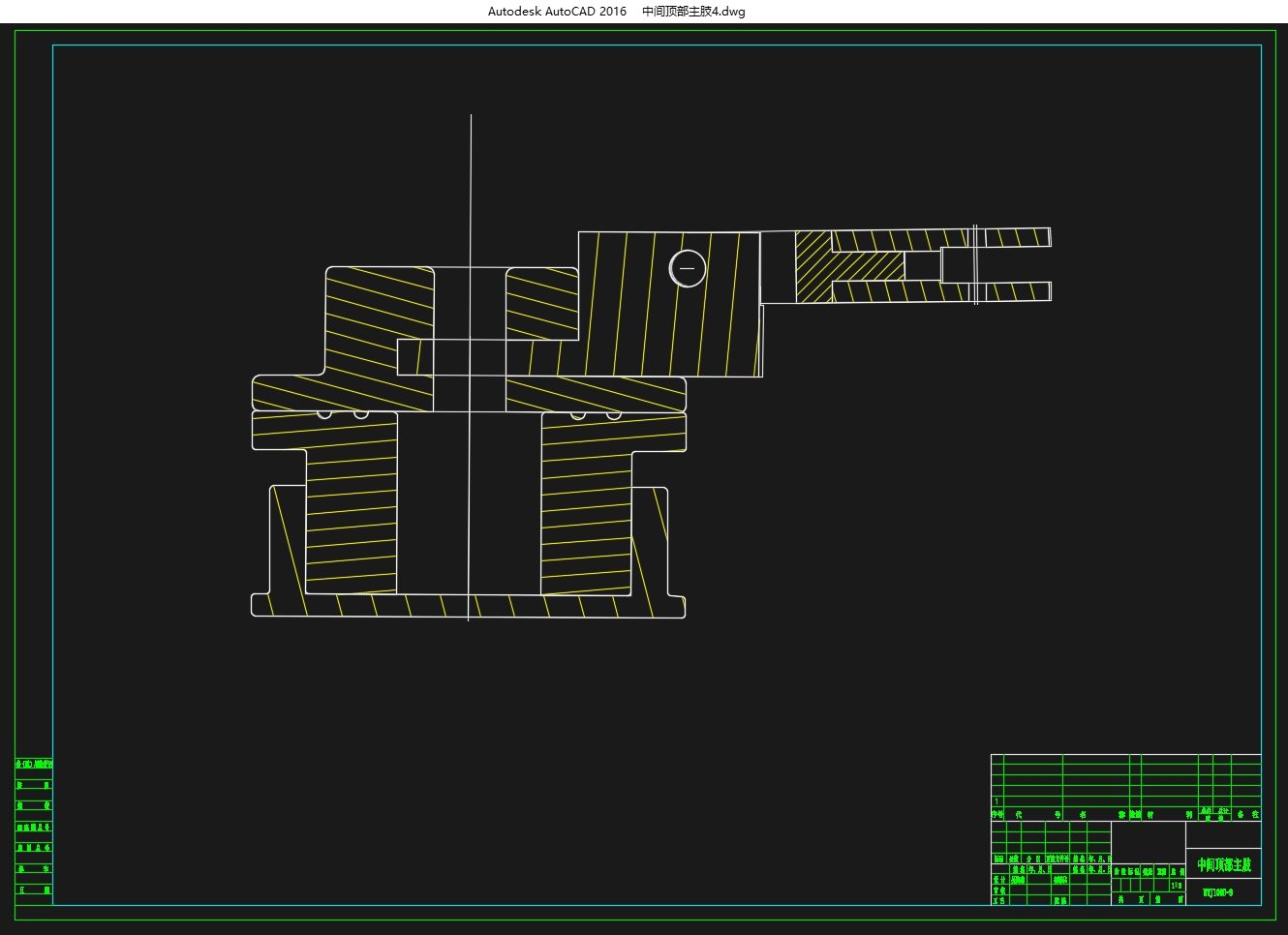
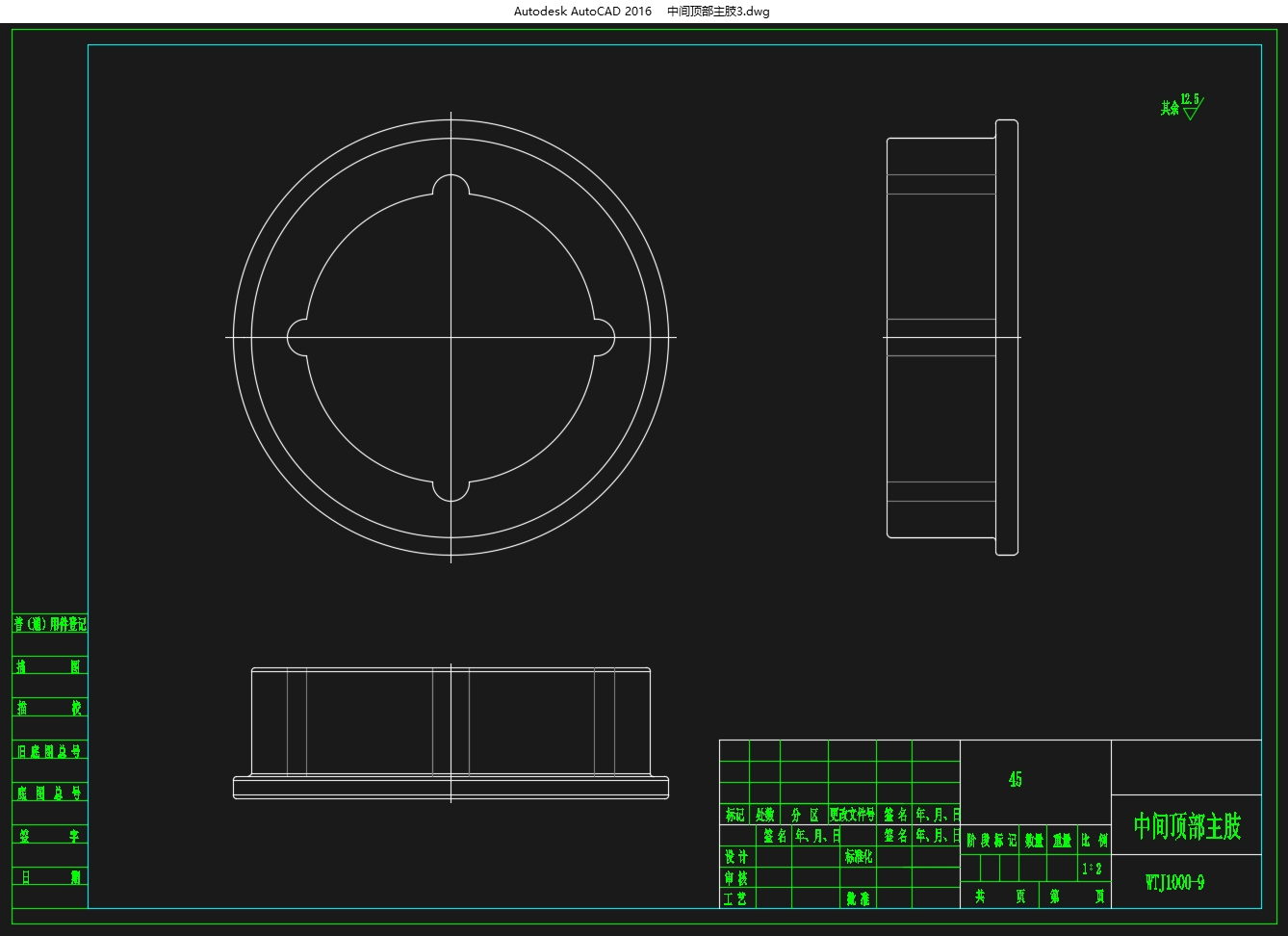
该设计是三度的自由工业机器人的手腕(5公斤负载),可以在两个方向旋转,并在一个方向弯转。三维软件使用的是Pro/ENGINEER野火版4.0,Pro/ENGINEER野火版4.0的功能强大而且操作方便,所以用它来建模最合适了。它提高了产品的质量,同时也大大降低了时间和成本。在此基础上。本文设计了机器人的手腕的控制系统,包括数据采集卡和驱动程序、端子板电路的设计和控制软件的设计,重点是加强传动部件的可靠性和机械手的安全性。
关键词:三自由度,机器人手腕
Abstract
In the current manufacturing industry, due to its large scale, in order to improve production efficiency and ensure product quality, enterprises have made robotic arms an indispensable and important part of the production line, which have gradually been accepted and recognized by a wide range of enterprises. In recent years, the rise of industrial robots has improved the situation of modern industry.
[来源:http://www.doc163.com]
This design is a three - degree - of - freedom wrist of an industrial robot (with a 5 - kilogram load), which can rotate in two directions and bend in one direction. This paper designs the control system of the robot's wrist, including the design of the data acquisition card and driver, the terminal board circuit, and the control software. The focus is on enhancing the reliability of the transmission components and the safety of the robotic arm.
[资料来源:https://www.doc163.com]



目 录
摘 要 I
Abstract II
1绪论 1
1.1工业机器人简介 1
2 工业机器手腕的总体设计 2
2.1机器手腕总体设计概述 2
2.2腕部结构特点 4
2.2.1 概述 4
2.2.2三自由度手腕 4
2.2.3柔顺手腕结构 4
3 机器手腕系统设计 6
3.1实现三个自由度 6
3.2传动机构的设计 6
4 传动装置的初步设计与计算 8
4.1锥齿轮的设计计算 8
4.1.1 选材料并确定初步参数 8
4.1.2 齿面接触疲劳强度计算 9
4.1.3 齿根抗弯疲劳强度验算 10
4.1.4 几何尺寸计算 11
4.2锥齿轮17,16的设计 11
4.2.1选材料并确定初步参数 11
4.2.2 齿面接触疲劳强度计算 12
4.2.3 齿根抗弯疲劳强度验算 13
4.2.4 主要几何尺寸计算 15
4.3 同步带传动设计 15
4.3.1 设计功率 15
4.3.2 带轮的基本尺寸 16
5 机器人运动控制 18
5.1 机器人控制的特点 19
5.2机器人控制的分类 20
5.3 机器人控制系统 22
6 控制系统硬件 23
6.1 控制系统模式的选择 23
6.2 控制系统的搭建 24
6.2.1工控机 24
6.2.2运动控制器 25
6.2.3 驱动器 26
6.3 控制器与计算机、驱动器及电机的连接 28
6.3.1 控制器与计算机的连接 28
6.3.2 控制器与驱动器连接 28
6.3.3 驱动器与电机连接 31
7 三维造型的绘制 32
7.1 造型软件简介 32
致 谢 36 [资料来源:http://www.doc163.com]
参考文献 37 [版权所有:http://DOC163.com]
下一篇:门式起重机起升机构的优化设计(含CAD装配图,UG零件图)