
搬运型自导引小车(AGV)设计(含CAD图,SolidWorks三维图)
搬运型自导引小车(AGV)设计(含CAD图,SolidWorks三维图)(论文说明书11500字,CAD图5张,SolidWorks三维图)
摘 要
AGV作为移动机器人的一种,在仓储物流、制造装配线上发挥着越来越重要的作用,满足了市场多元化的需求。综合其自动化程度、工作效率、交互能力优越,现阶段对于其研究也越发深入。AGV小车是机电一体化的综合性产品,囊括了机械制造及其自动化的基本专业知识,掌握其工作原理也是学生的时代要求。本次的工作内容大致如下:
1.首先描述了国内外的AGV发展状况,以及现阶段国内的AGV发展行情。对一些基本技术及原理进行阐述分析,对其进行充分地认识。
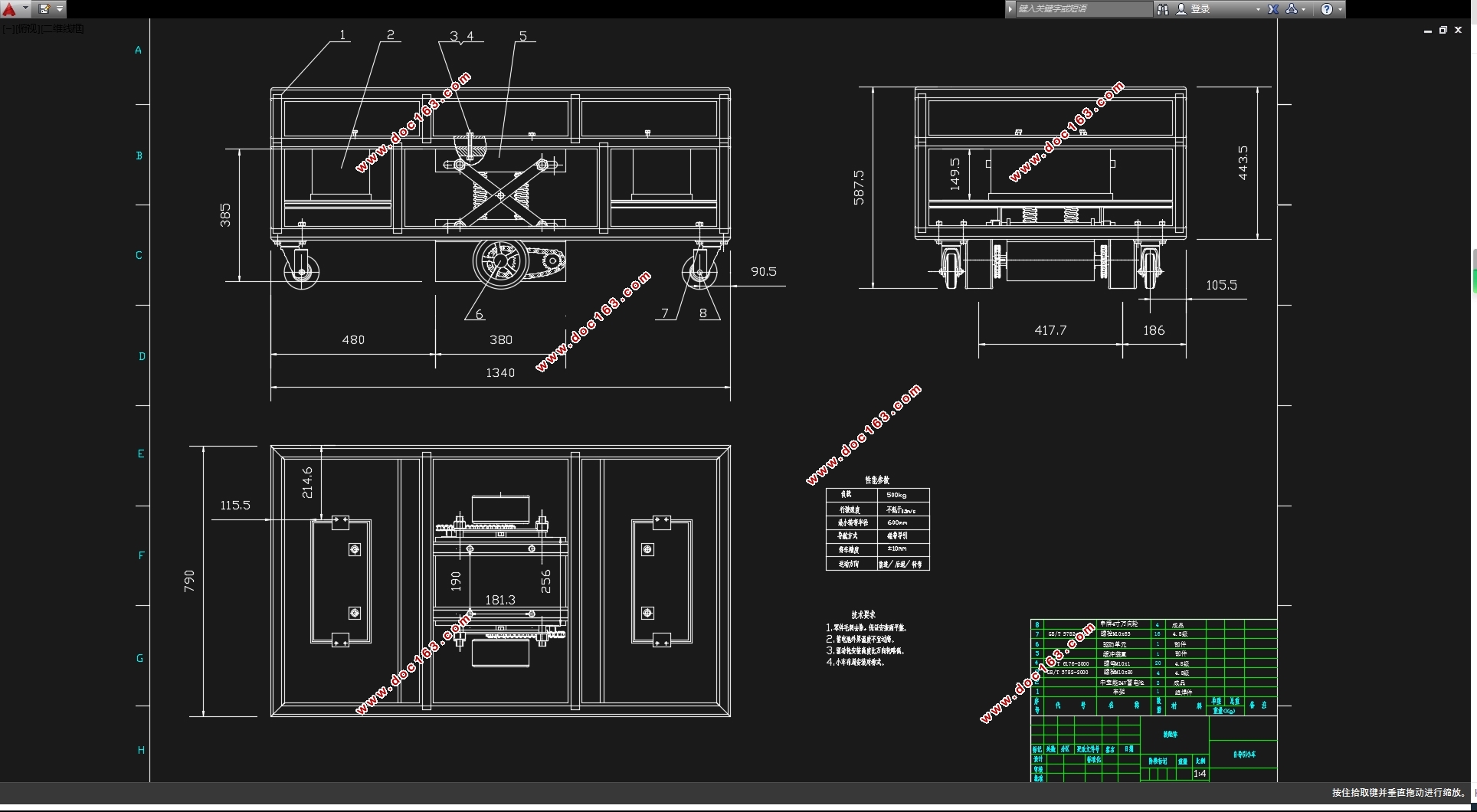
2.分析设计任务的要求,进行小车的整体方案设计,包括各个部分之间的布局以及相应的协调关系,经过几种方案的对比,选择了磁导引的导航方式以及差速轮进行驱动。
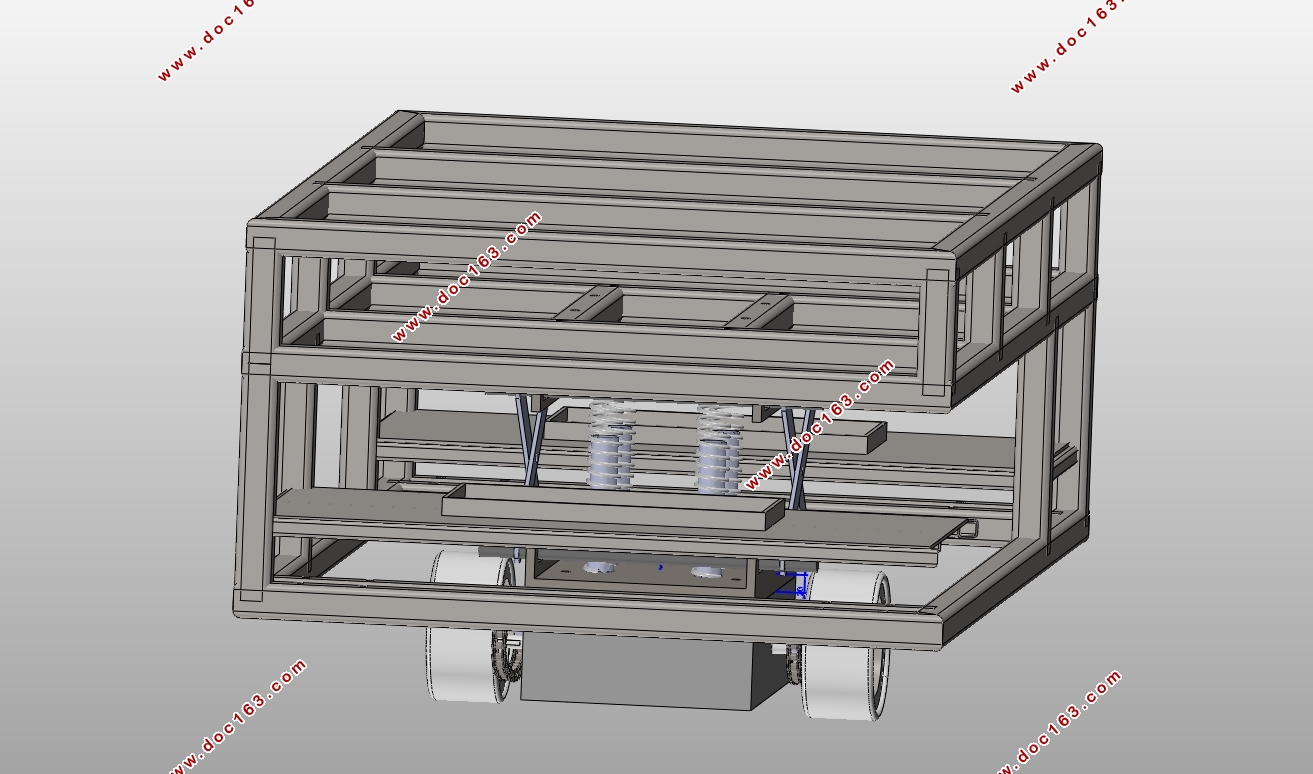
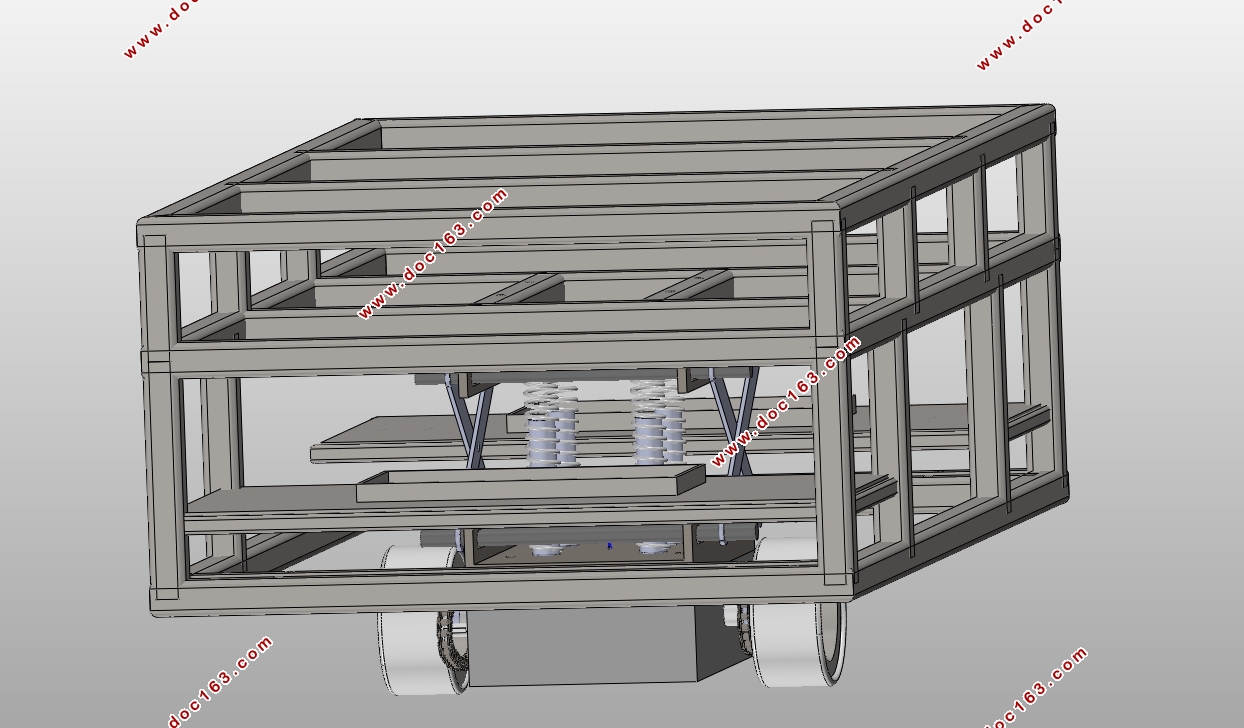
3.根据小车承受负载情况对车架进行设计并进行结构有限元分析,综合比较选择出合理的材料以及尺寸规格;然后根据所需要行驶阻力对电机进行选型,进行驱动单元的设计,并进行简单的装配。
4.选择了PLC为主控制器,规划出控制器与各个单元之间的控制网络,并对电机驱动方面进行了详细控制设计,最后是常用的一些传感器的和其他装置介绍与使用。
关键字:AGV ; 磁导引; 差速 ; PLC ; 传感器
Abstract
AGV, as a kind of mobile robots, plays a more and more significant role in warehouse logistics and manufacturing assembly line matching the need of market diversification. Due to the superiority of automation, efficiency and interaction of AGV, people research and develop it further. AGV is a comprehensive product which involves the specialized knowledge in Mechanical Engineering. It is a requirement for us to master its academic knowledge in school days. The contents of work are as follow.
1.This essay gives a introduction in the developing situation at home and abroad and the developing quotation in current domestic stage of AGV. With analyzing the fundamental technology and principles. I know about a lot for it
2. Combining the design task, begin to design the whole structure. By comparing several plans, I choose the magnetic guidance as its drive mode and differential gear to drive it.
3.According to the load condition, I design the frame, analyze the structure and choose the reasonable material and size of it. Then I design the driving unit on the basis of driving resistance of the motor selection. Then, I assemble them. [来源:http://www.doc163.com]
4.Next, I choose a PLC, which control and coordinate the relationship between the controller and each unit and design the control system of the motor drive. The essay also includes the introduction and the analysis of some common sensors.and other devices.
Key Words: AGV; Magnetic guidance; Differential; PLC; Sensor
本次研究的主要内容
根据小车的负载能力,设计车架的机械结构,建模组装,并对其进行有限元分析,确保其结构安全的可靠性,然后由小车的运动方式,选择出喝水驱动结构,从计算行驶阻力,到选型电机,再构建驱动单元结构,与其他部件进行装配,得到整体机械结构的装配体。最后对控制系统部分设计,采用了PLC作为主控制器对电机驱动,还包含了一些传感器的选用和功能介绍,完成整个系统的设计。
[来源:http://www.doc163.com]


 [版权所有:http://DOC163.com]
[版权所有:http://DOC163.com] 


目录
1.绪论 1
1.1研究目的及意义 1
1.2AGV的发展历程 1
1.3我国AGV的发展状况 2
1.4本次研究的主要内容 4
2. AGV整体方案设计 5 [版权所有:http://DOC163.com]
2.1AGV综述 5
2.1.1AGV定义及特点 5
2.1.3 AGV的导引方式 7
2.2 整体方案设计 9
3. AGV机械结构设计 11
3.1 车架设计 11
3.2 驱动单元结构设计 13
3.2.1 计算行驶阻力 14
3.2.2电机选型及基本布局 15
3.2.3 缓冲装置及AGV整体 18
4.AGV小车的控制系统设计 22
4.1 控制系统总体设计 22
4.2 电机驱动的控制设计 23
4.2.1 磁导航传感器 23
4.2.2 电机控制 24
4.3 其他传感器及装置的介绍 27
5.总结与展望 29
参考文献 30
致谢 31
下一篇:PN50\DN350单缸气动闸阀设计(含CAD零件图装配图)