
CWGS 400型擦窗机臂羊角臂头结构三维设计(含PROE三维图)
CWGS 400型擦窗机臂羊角臂头结构三维设计(含PROE三维图)(论文说明书10000字,PROE三维图)
摘要
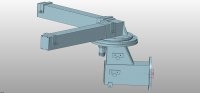
随着建筑物风格的多元化,对擦窗机的要求也日益多元化,为了不让顶楼的擦窗机影响建筑物的整体美观,对擦窗机的隐藏性要求也越来越高。以往的羊角臂可以分为三种类型:分别是高羊角臂头,中羊角臂头,和低羊角臂头。为了使目前使用的羊角臂头的垂直高度降的更低,得到更好的隐藏。本课论文羊角臂头进行三维设计,它不仅能降低羊角臂头的垂直高度,而且让该结构更加简单,功能齐全,能有效地减少了故障的概率,提高了使用寿命和安全性能。
本课题主要利用三维软件对擦窗机羊角臂头进行三维设计,计算校核和组装仿真。
关键词:擦窗机 羊角臂 三维设计 组装 运动仿真
Abstract
As the building style diversification, the demand of requirements gondola equipment are increasingly diversified, in order not to let the top floor clean window machine affect the structure of the whole beautiful, the hidden requirements for gondola equipment become more and more important .Previous knuckle arm can be divided into three types: high knuckle arm ,middle knuckle arm and low knuckle arm .This class paper is about the 3 d design for knuckle arm head , it can not only reduce the knuckle arm head of vertical height, and make the structure more simple, multiple functions, can effectively reduce the probability of failure,safety and improve the service life. [资料来源:http://doc163.com]
This topic mainly by using three-dimensional software to design the gondola equipment , calculation ,checking ,assembly and motion simulation.
Keywords: gondola equipment knuckle arm three-dimensional design assembly motion simulation
[资料来源:http://doc163.com]




[来源:http://Doc163.com]
目录
摘要 I
目录 III
第一章 绪论 0
1.1擦窗机发展概况 0
1.1.1擦窗机简介 0
1.1.2擦窗机的定义及作用 0
1.1.3擦窗机的分类与选型考虑因数 2
1.2 擦窗机头的概述 2
1.2.1擦窗机头的发展和趋势 2
1.2.2羊角臂的概述 3
1.3 三维设计软件(Pro/E)概述 4
1.3.1 Pro/E简介 4
1.3.2 Pro/E的发展历史和趋势 4
1.3.3应用领域 5
第二章 羊角臂功能结构分析 6
2.1羊角臂功能 6
2.2羊角臂构成 6
2.2.1 上座 6
2.2.2 下座 7
2.2.3 回转支承 8
2.2.4 滑轮组 8
2.2.5 电机及减速器 9
第三章 羊角臂三维建模 10
[资料来源:http://Doc163.com]
3.1 Pro/e的三大特色 10
3.2 Pro/E三维设计的优势 10
3.3 三维建模 11
3.3.1 上座建模 11
3.3.2 回转支承建模 11
3.3.3 下座建模 12
3.4 零件组装及运动仿真 13
3.4.1 组装 13
3.4.2 运动仿真 13
第四章 羊角臂相关计算 15
4.1回转支承选型校核 15
4.1.1 型号选择 15
4.1.2 外载荷确定 16
4.1.3 单排球式回转支承的当量静容量计算 16
4.1.4 选型计算 18
4.1.5 应力及变形的计算 18
4.1.2 回转支承校核 25
4.2 回转支承螺栓校核 27
4.2.1 螺栓受力分析 27
4.2.2 螺栓直径校核 29
4.2.3 校核螺栓所需的预紧力是否合适 29
4.3 羊角臂头螺栓校核 29 [资料来源:Doc163.com]
4.3.1 应力计算 29
4.1.2 校核螺栓直径 31
4.1.3 校核螺栓所需的预紧力是否合适 31
结语 32
参考文献 33 [资料来源:http://Doc163.com]
下一篇:MQ4050单臂架门座起重机转台结构设计(含CAD图)