
五自由度的焊接机器人(含CAD零件图装配图)

五自由度的焊接机器人(含CAD零件图装配图)(论文说明书16000字,外文翻译,CAD图6张)
摘 要
据不完全统计,全世界在役的工业机器人中大约有将近一半的工业机器人用于各种形式的焊接加工领域,焊接机器人应用中最普遍的主要有两种方式,即点焊和电弧焊。我们所说的焊接机器人其实就是在焊接生产领域代替焊工从事焊接任务的工业机器人。这些焊接机器人中有的是为某种焊接方式专门设计的,而大多数的焊接机器人其实就是通用的工业机器人装上某种焊接工具而构成的。在多任务环境中,一台机器人甚至可以完成包括焊接在内的抓物、搬运、安装、焊接、卸料等多种任务,因此,从某种意义上来说,工业机器人的发展历史就是焊接机器人的发展历史。
众所周知,焊接加工一方面要求焊工要有熟练的操作技能、丰富的实践经验、稳定的焊接水平;另一方面,焊接又是一种劳动条件差、烟尘多、热辐射大、危险性高的工作。工业机器人的出现使人们自然而然首先想到用它代替人的手工焊接,减轻焊工的劳动强度,同时也可以保证焊接质量和提高焊接效率。
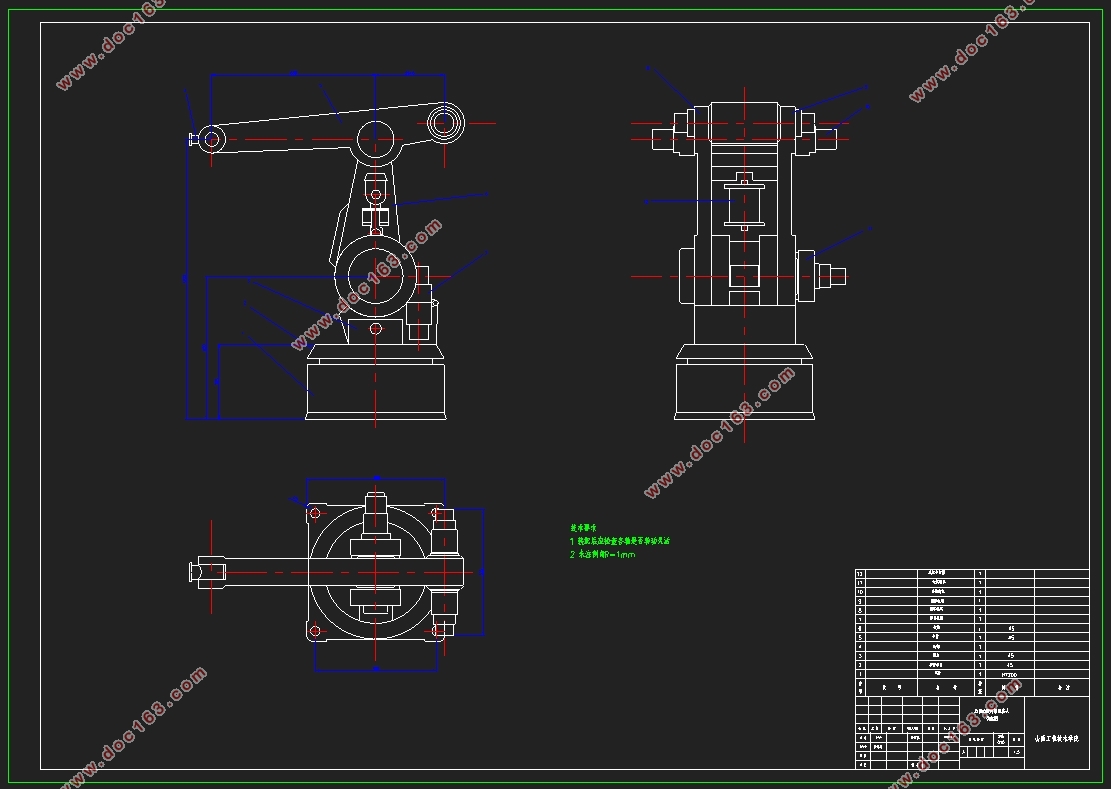
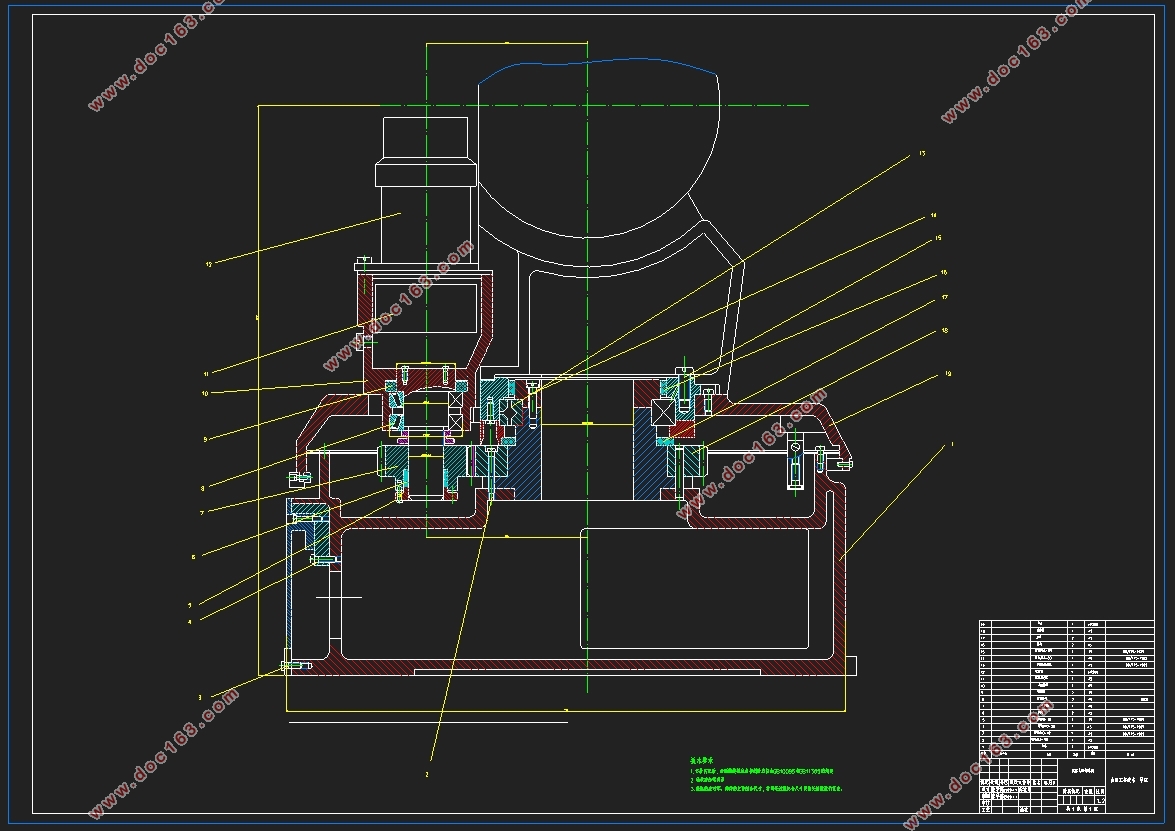
本次我所设计的机器人为五自由度弧焊机器人。本说明书对本次设计的主要考虑内容进行了叙述和讲解,包括机器人的总体设计以及传动系统的构成与设计,电动机的选择,圆锥齿轮的设计与校核,谐波减速器的原理以及选择,腕部转动轴的校核,齿形带规格的选择以及滚动轴承的选择与校核等。
[版权所有:http://DOC163.com]
由于设计经验不足以及理论知识的匮乏,本次设计肯定存在许多不足之处,望答辩老师谅解并不吝赐教。
关键词: 焊接机器人;齿形带传动;谐波减速器;五自由度
Welding Robot With Five Degrees Of Freedom
Abstract
According to incomplete statistics, nearly half of the world's industrial robots in service are used for welding. The most common application of welding robot are in two main ways, spot welding and arc welding. The welding robot we are talking about is actually industrial robots which are doing the work in the welding tasks instead of welding production welder. Some of this welding robot is specially designed for welding while most of them are actually a common industrial robot fitted with a welding tool. In multi-task environment, a robot can even complete many kinds of work including the grasp of welding, handling, installation, welding, unloading and other tasks,. Therefore, in a sense, the history of the development of industrial robots is the history of the development of welding robot. [资料来源:www.doc163.com]
It is well known that the welding processing on one hand requires on skilled operational skills, rich practical experience and stable level of welding; on the other hand, welding is a work with poor working conditions, dust, and heat radiation and high-risk. The emergence of industrial robots first makes people naturally think of using it to replace the manual welding to reduce labor intensity. But also it ensures the welding quality and enhances the efficiency of welding.
The robot I designed is a DOF arc welding robot. The design statement mainly include design of robot's drive system and the its composition, the choice of motor, design of bevel gear and verification, the principle of harmonic reducer and its choice, wrist Check the Department of rotational axis, the choice of rolling bearings and its checking and so on.
Key Word: welding robot; profile belt transmission; harmonic reducer; 5-DOF
[版权所有:http://DOC163.com]
目录
前言 4
1.1总述 4
1.2本产品的意义 5
1.4焊机机构设计研究现状与发展趋势 8
1.5选题的依据及意义 8
1.5.1选题的依据 8
1.5.2选题的意义 9
1.6运动学分析的常用方法 9
1.1工业机器人弧焊工作站的工作任务: 12
1.5点焊 14
1.6,设计示意图 16
2设计基本思路 17
2.1总体设计思路及内容 17
2.2结构设计 18
1— 机座 2—转台 3—腰座 4—腕部 5—小臂 6—大臂 18
2.1.2 自由度和坐标系的选择 19
2.2设计传动方案 20
2.1驱动—传动系统的构成 20
3焊接机器人的结构设计 21
3.1驱动器 21
3.2大臂的设计 34
3.2.1电动机选择: 34
3.2.2谐波齿轮减速器的选择 35
3.2.3轴的计算 35
一、轴的结构设计 35
二、轴的校核 36
4.总结 37
参考文献 38
致 谢 39 [资料来源:Doc163.com]
上一篇:矿用200KW悬臂式掘进机截割部设计(含CAD零件图装配图)
下一篇:三自由度可移动小车焊接机器人的结构设计(含CAD零件图装配图)