
病人行走辅助机构(下肢行走康复机器人)的设计(PROE三维图)
病人行走辅助机构(下肢行走康复机器人)的设计(PROE三维图)(论文说明书15000字,PROE三维图)
摘要
康复机器人技术则是近年来迅速发展的一门新兴机器人技术,是机器人技术在医学领域的新应用;目前康复机器人已成为国际社会研究的热点之一。本课题主要研究的中风病人行走辅助机构。
随着社会的发展和科技的进步,未来的设计是基于研究和以三维造型为基础的设计。在以后的设计中会更加多的加入人机工程学的内容,而人机工程学的研究也呈现出了很多崭新的面貌,其定义的范围也在不断拓展。本次设计是通过人机工程学与实际相结合,以Pro/E为基础,结合人体尺寸来设计运动器材椭圆机的。其中大量的运用到Pro/E技术来设计,以实现椭圆机的三维造型。椭圆机的设计实现了在小范围内达到科学锻炼身体的目的,其操作简单明了,噪音小,无污染,使用安全可靠。
关键词:中风 行走辅助机构 康复
ABSTRACT
The rehabilitation robot technology is a new robot technology developed rapidly recently, which is a new application in medical fields of robot technology. Currently the research on rehabilitation robot has been one of the focuses in the International Society. The rehabilitation robot technology is a synthesis of many subjects, which covers mechanics, electronics, control and rehabilitative medicine and so on; it has been a typical representation of the mechatronics research. The main research of this paper is based on the attitude control gait rehabilitation training system design. [资料来源:http://Doc163.com]
In this paper, lower extremity rehabilitation and development of robot applications at home and abroad, lower extremity exoskeleton training robot's overall program design, structural design, design and overall control; gait training on the robot for three-dimensional modeling, and important parts to check. The robot gait training has a total of five degrees of freedom, each of which a mechanical leg joints have two (2 DOF) to imitate human knee, hip and a weight relief for weight relief system (including a degree of freedom). The system can be used for brain injury, stroke, and to help patients better rehabilitation training, and meets the needs of different groups of people.
Key words:rehabilitation training robot lower extremity exoskeletons
[资料来源:http://doc163.com]




 [资料来源:http://www.doc163.com]
[资料来源:http://www.doc163.com] 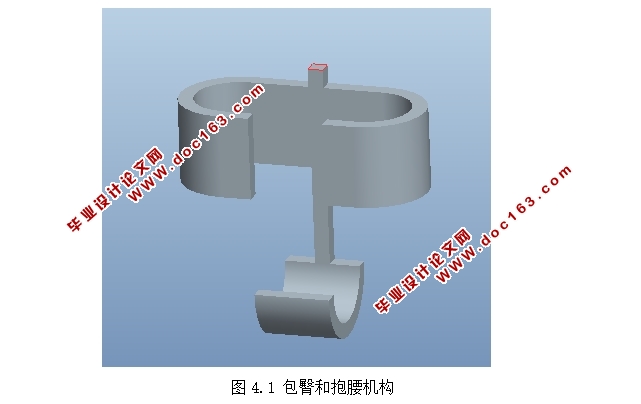

目录
摘要 I [资料来源:Doc163.com]
ABSTRACT II
第一章 绪论 1
1.1下肢行走辅助机构研究背景 1
1.2 中风病人行走辅助机构研究目的和意义 1
1.3 病人行走辅助机构研究概况 2
1.3.1 国外研究发展概况 2
1.3.2 国内研究发展概况 6
1.4存在问题 9
1.5论文选题意义及研究内容 9
第二章 人体下肢运动分析 11
2.1人体下肢解剖作用 11
2.2下肢主要关节特征 12
2.3 步态分析 14
第三章 椭圆机设计 15
3.1 基于机械设计原理轴的设计(包括套筒的设计,轴承的选择) 15
3.1.1 轴Ⅰ的结构设计 15
3.1.2 轴Ⅱ的结构设计 16
3.1.3 轴Ⅲ的结构设计 18
3.2 螺母的选择及其主要尺寸 19
3.3 椭圆机的人机工程设计 19
3.3.1 椭圆机的简介及其设计要求 19
3.3.2 人体尺寸的选择 20
3.3.3 踏板间距和踏板大小的确定 22
3.3.4 外观及色彩设计 22
第四章 人体负重装置 24
4.1包臀和抱腰的设计 24
4.2负重机构机架设计 24
4.3负重机构的平衡块的设计 25
第五章 Pro/E建模 26
5.1 轴的三维模型形成 26
5.2 轴承的三维模型形成 27
5.3 垫圈的三维模型形成 28
5.4 螺母的三维模型形成 29
5.5 踏板的三维模型形成 30
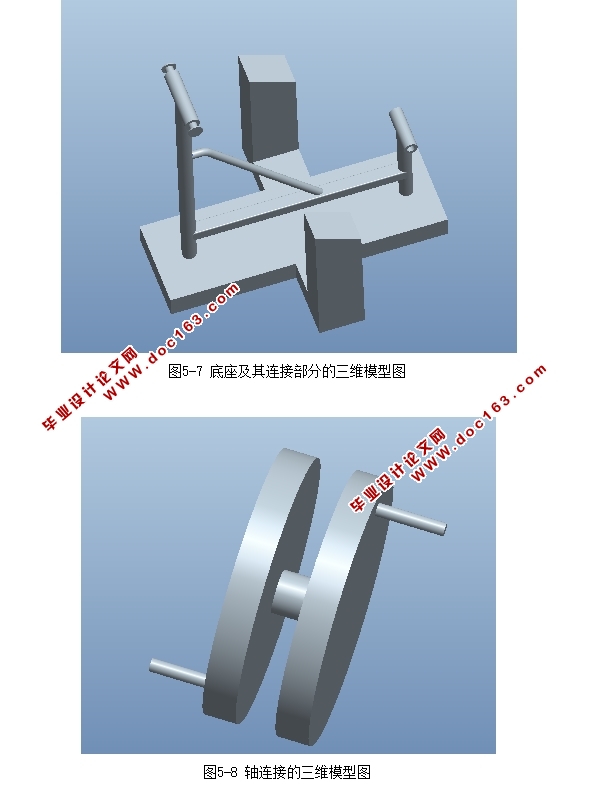
5.6 底座及其连接部分三维模型的形成 30
[资料来源:http://Doc163.com]
5.7 轴连接三维模型形成 31
5.8 杆连接部分三维模型的形成 32
5.9 轴三维模型的形成 33
5.10 杆连接三维模型的形成 33
5.11 负重机构三维模型 34
5.12 椭圆机总装配图的三维模型 35
第六章 结论 36
参考文献 37
[来源:http://Doc163.com]
下一篇:车床主轴箱箱体右侧10-M8螺纹底孔组合钻床设计(PLC控制)(含CAD图)