
人工肌肉驱动腕关节的柔顺机构设计(含CAD图,Solidworks三维图)
人工肌肉驱动腕关节的柔顺机构设计(含CAD图,Solidworks三维图)(任务书,开题报告,周记,论文说明书14600字,CAD图7张,Solidworks三维图)
摘要
机器人的腕关节对于确定末端执行器的接触状态以及位置和姿势而言具有十分重要的作用,腕关节的性能直接决定了整个机器人手臂性能的优劣。传统的机器手腕关节多是刚性结构,对环境的适应性比较差。腕关节的柔顺性改善及其重要。形状记忆合金,即SMA因其具有温度记忆效应、形状记忆效应、超弹性而广泛应用于航空航天、交通、能源、机械电子、生物、医学及日常生活领域。作为一种新型功能材料,对其的研究已经成为智能材料和结构领域的一项重要研究内容。本文的主要通过对仿生腕关节进行结构分析,结合SMA材料特性,选用合适的SMA材料,设计出一种具有较大运动范围的仿生腕关节的驱动结构。主要内容如下:第1章阐述本文的研究背景和目的。第2章对腕关节结构进行了介绍。第3章介绍了SMA及其特性。第4章对本文采取的驱动结构及相关问题作了介绍。第5章是本次设计的实物图。第6章总结了本文的主要工作、结论,同时对后续工作做出了展望。
关键词:腕关节;形状记忆合金;柔顺性
Abstract
The wrist of the robot has a very important role in determining the contact state and position and posture of the end effector. The performance of the wrist determines the performance of the whole robot arm directly. The traditional machine wrist joints are mostly rigid structure, the adaptability of the environment is relatively poor. Improvement of the compliance of the wrist and its importance. Shape memory alloy, that is, SMA is widely used in aerospace, transportation, energy, mechanical electronics, biology, medicine and daily life because of its temperature memory effect, shape memory effect and superelasticity. As a new functional material, its research has become an important research content in the field of intelligent materials and structures. In this paper, we mainly through the structural analysis of the bionic wrist joint, combined with the characteristics of SMA material, choose the appropriate SMA material, designed a larger range of motion of the bionic wrist joint drive structure. The main contents are as follows: Chapter 1 elaborates the research background and purpose of this paper. Chapter 2 describes the wrist structure. Chapter 3 introduces SMA and its characteristics. Chapter 4 introduces the driver structure and related problems in this paper. Chapter 5 is the physical map of this design. Chapter 6 summarizes the main work of this paper, the conclusion, while the follow-up work to make a prospect. [来源:http://Doc163.com]
Key Words:Wrist; shape memory alloy; compliant
[资料来源:http://www.doc163.com]




 [版权所有:http://DOC163.com]
[版权所有:http://DOC163.com] 



[资料来源:Doc163.com]
目录
第1章绪论 1
1.1研究背景和目的 1
1.2国内外研究现状 1
1.3研究内容 4
1.4预期目标 5
第2章仿生腕关节结构设计 6
2.1人体腕关节结构与运动 6
2.1.1人体上肢组成 6
2.1.2腕关节的组成 7
2.1.3腕关节运动 8
2.2仿腕关节结构 8
第3章形状记忆合金材料SMA 10
3.1形状记忆合金材料基本性能 10
3.2形状记忆效应 11
3.3SMA驱动方式 11
3.2.1SMA丝驱动 12
3.2.2SMA弹簧驱动 12
3.2.3SMA棒驱动 13
3.2.4SMA管驱动 14
3.3SMA控制技术 15
第4章 SMA驱动结构 19
4.1SMA布置方案 19
4.1.1弹簧形布置 19
4.1.2矩形布置 20
4.1.3方式比较 21
4.2SMA强度问题 21
4.3SMA长度计算 22
4.3.1B板方向SMA长度 22
4.3.2A板方向SMA长度 24
4.4SMA连接 25
4.4.1松弛安装 25
4.4.2加热安装 25
4.4.3增加弹性元件 26
4.4.4方案选择 27
4.5弹性元件 27
4.5.1拉伸弹簧 27
4.5.2橡胶管 28
4.5.3比较 28
4.6干涉 28
4.7工作台 29
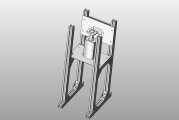
第5章柔顺手腕实物图 31
第6章总结与展望 34
致谢 35
参考文献 36
下一篇:笔记本外壳抛光工作台设计(含CAD图,Solidworks三维图)