
二维运动平台的结构设计(CAD,PROE三维建模)
资料介绍:
二维运动平台的结构设计(CAD,PROE三维建模)(任务书,开题报告,论文说明书11000字,cad图纸8张,PROE三维模型)
[资料来源:http://doc163.com]
中文摘要
从第二次工业革命开始,机械化便已深深地扎根于我们的生活之中;对于现在人们日益增长的物质文化需求,原本的参杂大量人力的“老式”机械化生产已略显颓势;作为被誉为最可能是人类史上第三次工业革命的电子机械化,毫无悬念地取代了“老式”机械化生产;而其中的运动控制技术便是其时代下的典型产物,本文以运动控制技术为基础,根据运动指标的要求,完成二维运动平台的自动控制,并通过软件对平台进行运动仿真;本文大体可分为二维运动平台的机械结构设计,三维模型的建立以及运动仿真分析三大部分。
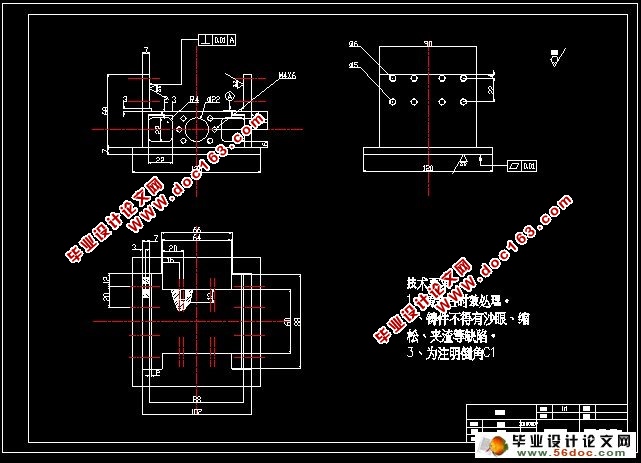
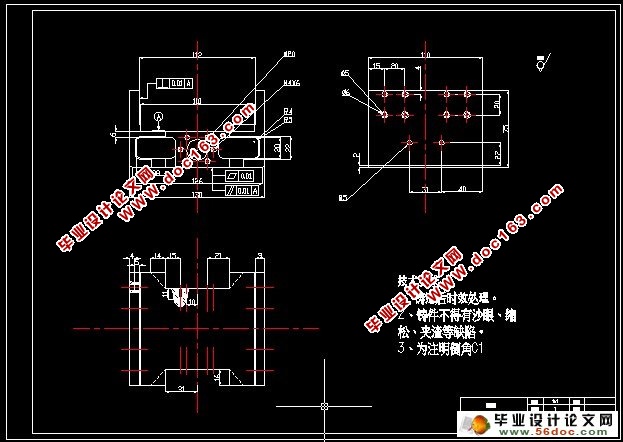
就二维运动平台的机械结构设计,根据具体任务要求先从标准件的选型起手,确定标准件后着手设计平台的其他非标部分,并使用AUTOCAD绘制出相应的二维工程图,之后使用PRO/E以平台的二维工程信息为基础进行三维实体模型的建立,最后使用PRO/E的仿真模块对平台进行运动仿真,从而达成二维运动平台的设计。
Abstract
Starting from the second industrial revolution, mechanization has deeply rooted in our life; For now people's growing material and cultural needs, originally mixed a lot human "old-fashioned" production mechanization has been slightly decline ; As known as the most likely is the third time in the history of mankind, mechanization of industrial revolution of the electron, there is no suspense to replace the "old" mechanized production; And the motion control technology is a typical product, under the age of this article is based on motion control technology, according to the requirement of the movement indicators, complete automatic control of two-dimensional motion platform, and through software for motion simulation platform; This article can be divided into the mechanical structural design of two-dimensional motion platform , the establishment of three-dimensional model and movement simulation analysis of three parts.
The mechanical structural design of two-dimensional motion platform, according to the specific mission requirements from selection of standard parts on hand first , determine the standard set out to design platform after other non-standard parts, and use AUTOCAD draw the corresponding two-dimensional engineering graphics, after using PRO/E based on the platform of the two-dimensional engineering information for the establishment of the three-dimensional entity model, finally using PRO/E simulation module to motion simulation platform, to achieve the design of the two-dimensional motion platform.
二维运动平台的研究目标
本文所设计的二维运动平台是以固高科技的运动控制卡为核心控制部件,以软件编程为基础,以成本最低为原则,实现最为基本的工作平台的二维移动控制。本文所设计的运动平台要实现通过软件的编程,让运动平台可以再一个二维平面上画出任何可以用线条组成的图形。
二维运动平台的实现方式
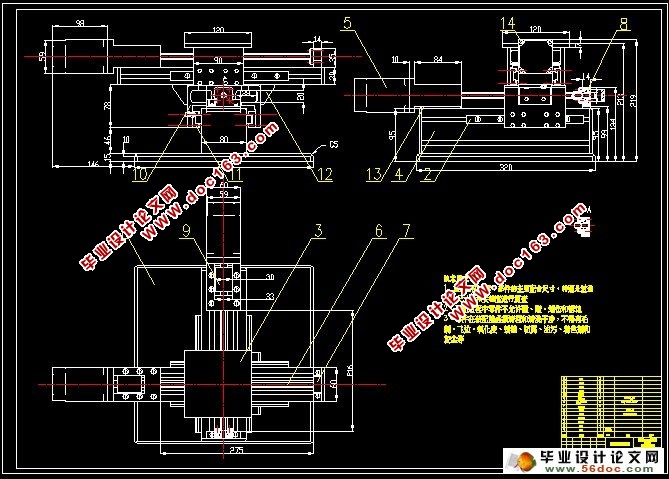
由于经济,能力等因素的限制,本人经过多番考量,决定选用固高科技的运动控制卡作为本文设计的二维运动平台的核心控制部件,驱动电机采用日本松下公司生产伺服电机;型号为NO.MHMD022P1U。传动机构选用滚珠丝杆,用联轴器直接连接电机与丝杆,实现将电机的旋转运动转换为运动平台的直线运动。二维运动平台通过上下垂直分布的X、Y轴实现方向上的两个维度;通过平台的X、Y方向上的移动,以一支固定的画笔实现在平台上作图。
二维运动平台的结构设计及研究
二维运动平台功能原理的确定
本课题所设计的二维运动平台,要求能够同时承受上下左右等各个方向的载荷 ,并且在伺服电机的控制下能够精确完成XY定位 ,达到毫米级的定位精度 。
二维运动平台是伺服步进电机驱动的线性滑轨平台 ,行程是400mm×400mm,运动速度最大为100 。工作电压为380V,可通过变频器来驱动伺服步进电机的运行,通过人机界面进行软件编程来控制电机的运行状态。
 [来源:http://www.doc163.com]
[来源:http://www.doc163.com] 
[版权所有:http://DOC163.com]
目录
中文摘要 I
Abstract II
第一章 绪论 3
1.1 二维运动平台的研究背景 3
1.2二维运动平台的研究目标 3
1.3二维运动平台的实现方式 3
第二章 步进电机、滚珠丝杆及联轴器的选型 4
2.1滚珠丝杆及其选型 4
2.1.1滚珠丝杆的基本原理 4
2.1.2滚珠丝杆的基本参数 4
2.1.3 滚珠丝杆的选型 5
2.2步进电机及其选型 6
2.2.1 步进电机的基本原理 6
2.2.2 步进电机的基本参数 8
2.2.3 步进电机的选型 10
2.3联轴器及其选型 12
2.3.1联轴器的作用和分类 12
2.3.2 联轴器的基本参数 13
2.3.3 联轴器的选型 13
第三章 二维运动平台的结构设计及研究 15
3.1二维运动平台功能原理的确定 15
3.2二维运动平台尺寸结构的设计 15
第四章 二维运动平台的模拟仿真 20
4.1 二维运动平台的三维建模 20
4.1.1 三维建模软件的选择 20
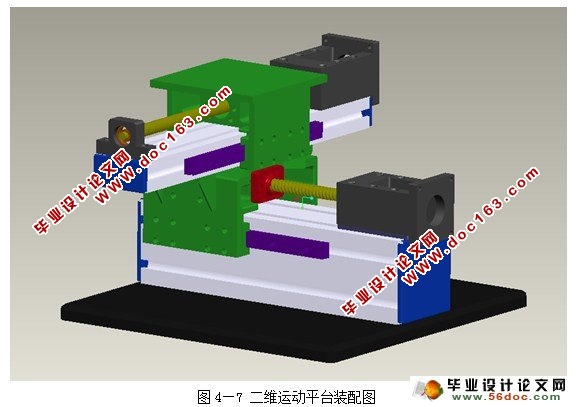
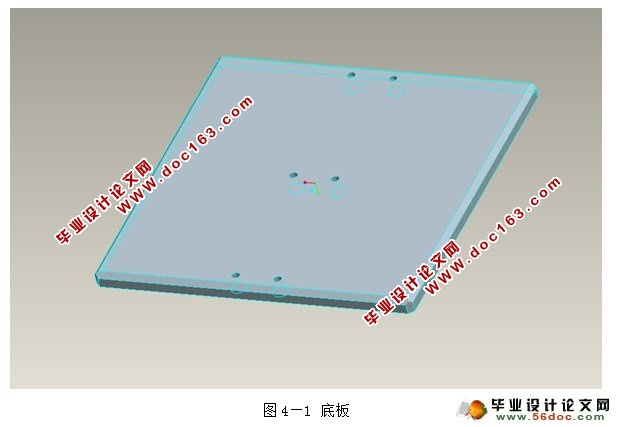
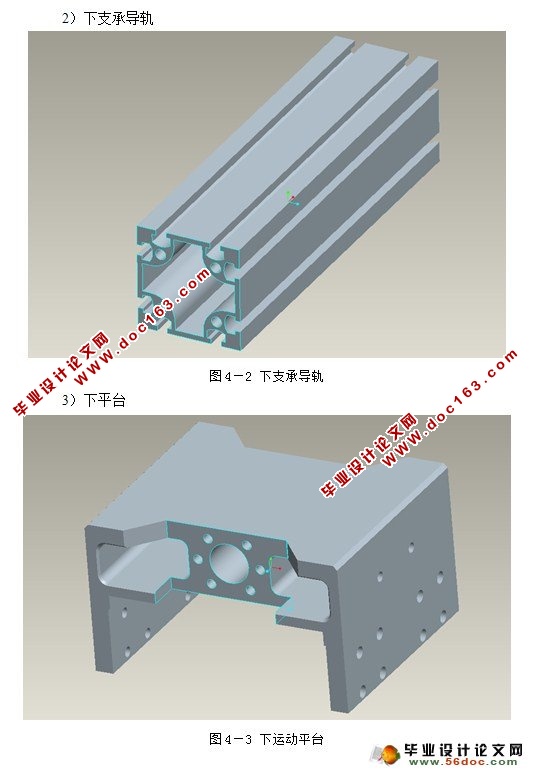
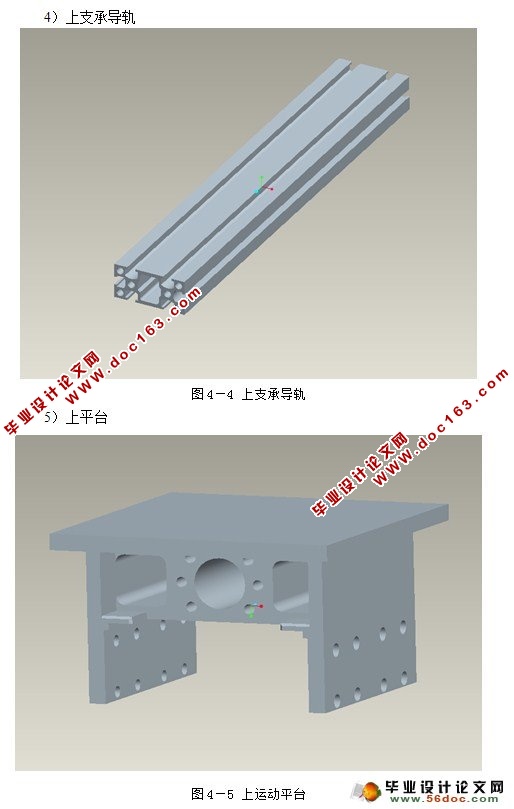
4.1.2 二维运动平台三维模型的建立 20
4.1.3 二维运动平台三维模型的分析 24
4,2 二维运动平台的仿真分析 24
4.2.1 仿真软件的选择 24
4.2.2 二维运动平台的仿真 24
第五章 结论与展望 25
5.1 结论 25
5.2 展望 25
参考文献 26
致谢 29
下一篇:秸秆粉碎机设计