
基于机械臂结构的3D打印机虚拟样机设计(SolidWorks三维,ADAMS仿真)
基于机械臂结构的3D打印机虚拟样机设计(SolidWorks三维,ADAMS仿真)(任务书,开题报告,外文翻译,论文说明书19200字,SolidWorks三维图Dobot简化图,matlab程序,ADAMS仿真)
摘 要
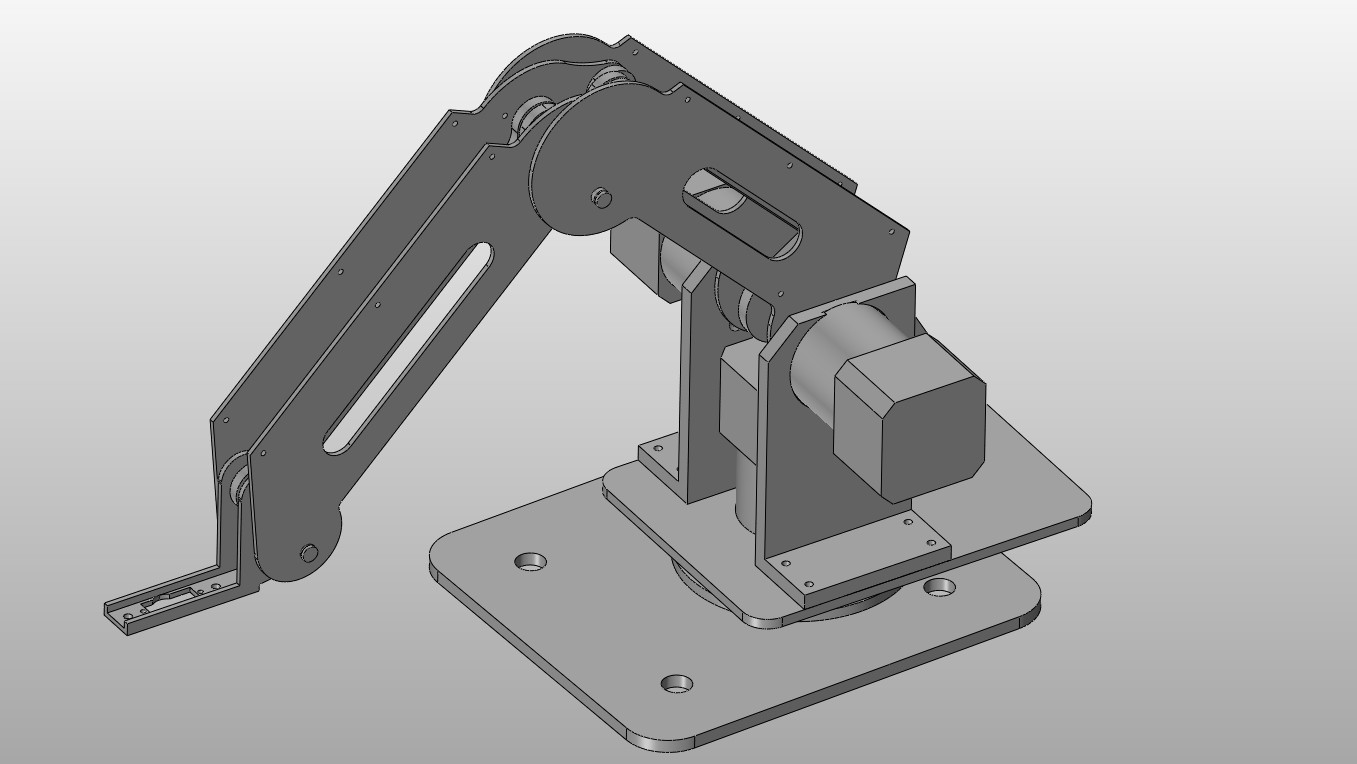
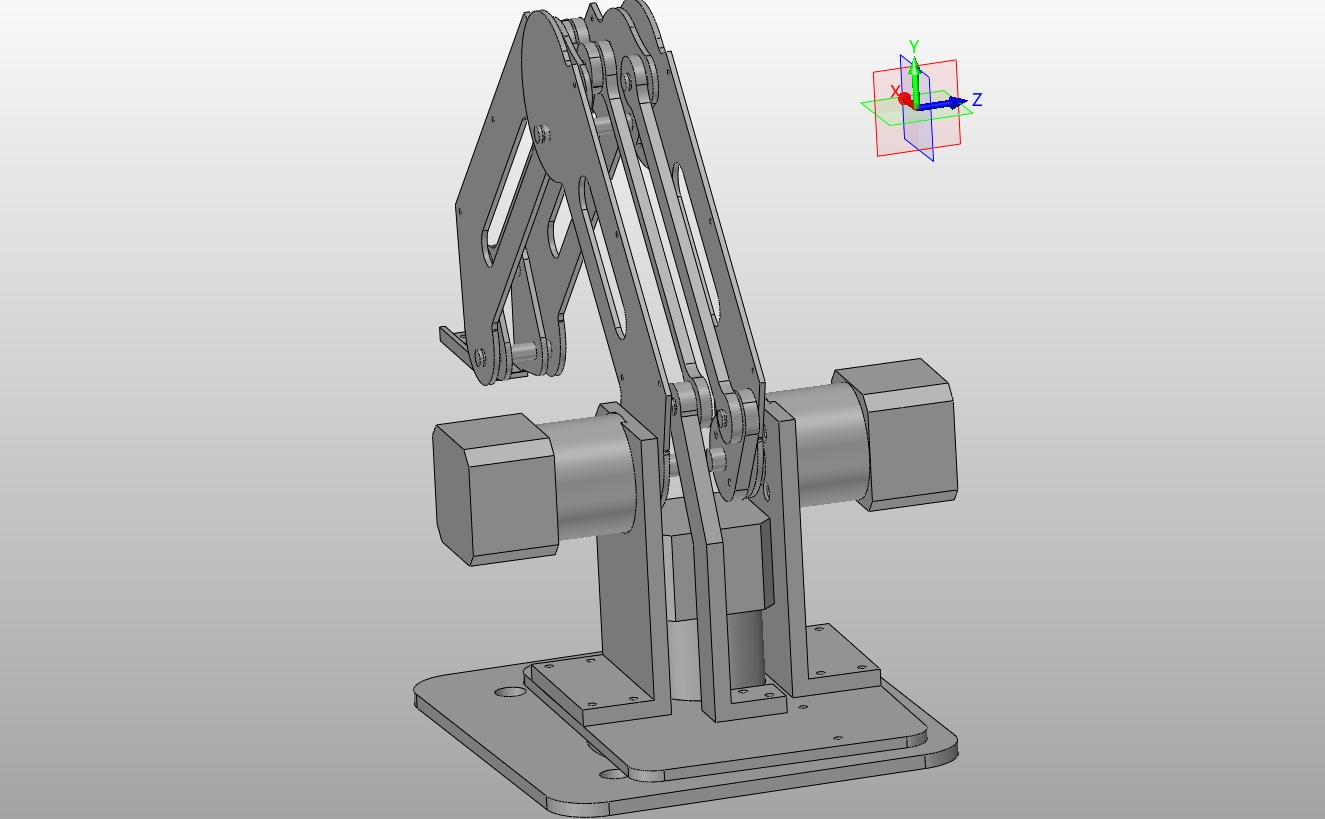
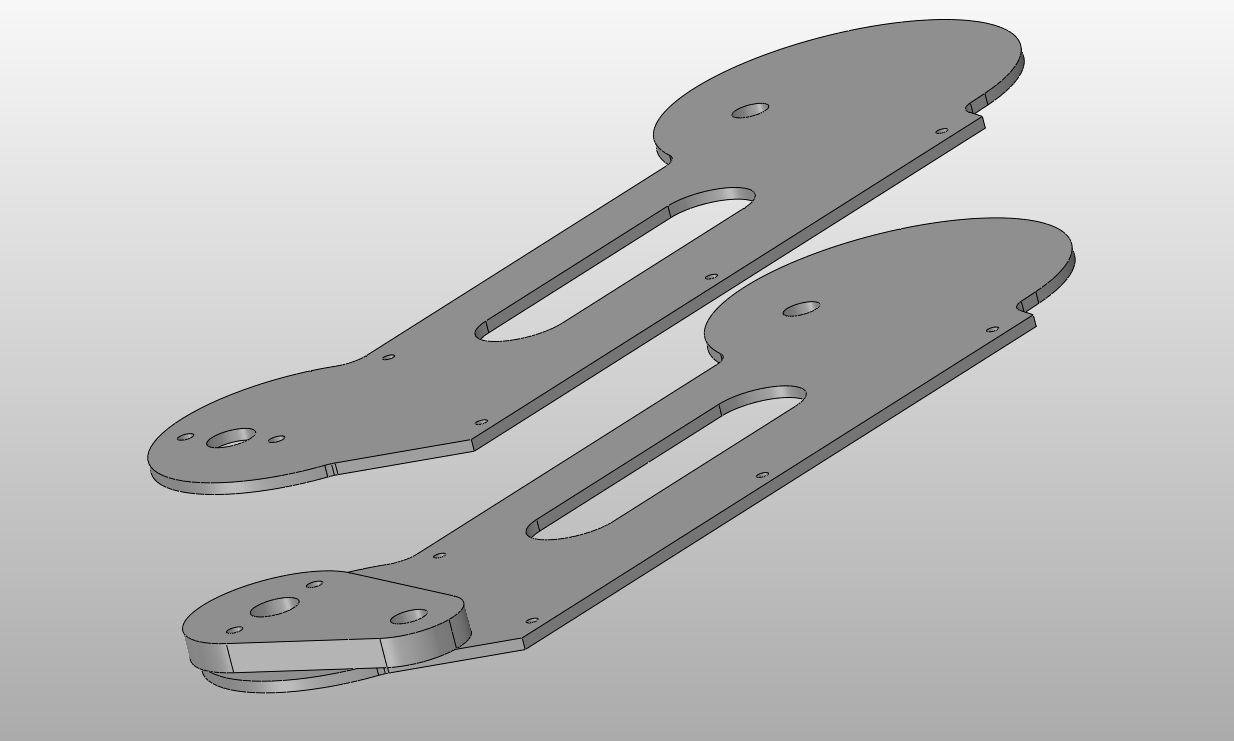
3D打印技术发展至今已有几十年,然而3D打印机在结构形式上大多数是基于直角坐标系,而机械臂形式鲜有耳闻,如今机器人技术也越发成熟,因为其结构灵活,动作可控,精度高的特点,将其与3D打印技术结合未尝不可,同时也互相丰富各自领域。本文基于机械臂结构3D打印机,主要研究机械臂的运动控制部分,并构建虚拟样机进行仿真。本文机械臂形式主要是基于Dobot机器人,本文分析了Dobot机器人所采用的3D打印技术,用Solidworks建立了Dobot机械臂模型,分析了其结构特性,并运用D-H法在Matlab中建立Dobot机械臂的运动学模型,通过齐次坐标变换矩阵求得它的正、逆运动学解,完成了仿真工作的准备阶段。在仿真阶段,本文采用笛卡尔空间轨迹规划方法对机器人进行了轨迹规划,并设计其轨迹路径(直线,圆弧,金字塔结构形式),然后通过Matlab中的RoboticsToolbox工具箱中的Ctraj函数(该函数的基本原理是运用了五次多项式插值方法)计算出了设计轨迹的中间点,最后在ADAMS中以样条函数的形式将中间点导入已建立好的模型,分别驱动Dobot机械臂3个电机控制的转动关节进行仿真,成功模拟打印出了直线轨迹和圆弧轨迹,并进一步仿真打印出了长方体,圆柱体和金字塔形结构的外轮廓。
本文特色:从Dobot机械臂打印机的基本结构开始分析,结合理论和实物结构讲解,一步步实现仿真,对于了解Dobot机械臂结构如何完成实现指定运动轨迹有重大意义和参考价值。
关键词:Dobot机器人,运动学分析,Matlab仿真,ADAMS仿真
Abstract
The development of 3D printing technology has been for several decades. However, most of the 3D printers are based on rectangular coordinate systems in their structural form, and robotic arms are rarely heard. Today, robotics technology has become more mature because of its flexible structure and controllable movements. High accuracy, combined with 3D printing technology is not a bad idea, but also enrich each other's fields. This thesis is based on the robot arm structure 3D printer. It mainly studies the motion control part of the robot arm and builds a virtual prototype for simulation. In this paper, the robotic arm is mainly based on the Dobot robot. This paper analyzes the 3D printing technology used by the Dobot robot, establishes the Dobot robotic arm model using Solidworks and analyzes its structural characteristics, and uses the DH method to establish the motion of the Dobot robotic arm in Matlab. Learning model, through the homogeneous coordinate transformation matrix to obtain its positive and inverse kinematics solution, completed the preparation phase of the simulation work. In the simulation phase, this paper uses Cartesian space trajectory planning method to carry out trajectory planning for the robot, and design its trajectory path (linear, arc, pyramid structure), and then through the Ctraj function in the Robotics Toolbox toolbox in Matlab. The basic principle of the function is to use the fifth-order polynomial interpolation method to calculate the middle point of the design trajectory. Finally, in the ADAMS, the intermediate point is introduced into the established model in the form of a spline function, and the three robots of the Dobot robot are respectively driven. The control of the revolute joints was simulated, and the straight trajectory and arc trajectory were successfully simulated, and the outlines of the cuboid, cylinder and pyramid structure were further simulated. [资料来源:Doc163.com]
Features of this thesis: Starting from the basic structure of the Dobot robot printer, combining theoretical and physical structure to explain, step by step to achieve the simulation, it is of great significance and reference value to understand how the Dobot robot arm structure accomplishes the specified movement trajectory.
Key words: Dobot robot, kinematics analysis, Matlab simulation, ADAMS simulation


 [来源:http://Doc163.com]
[来源:http://Doc163.com] 

 [资料来源:www.doc163.com]
[资料来源:www.doc163.com] 
目录
第1章绪论 1
1.1课题的研究目的及意义 1
1.2国内外研究现状 2
1.3 本文的主要工作 2
第2章机械臂3D打印机三维建模及结构分析 4
2.1 机械臂3D打印机三维建模 4
2.2 机械臂结构机构机理 6
2.2.1 机械臂3D打印机的内部结构介绍 6
2.2.2结构特点分析 9
2.3 机械臂3D打印技术分析 11
2.3.1 3D打印技术 11
2.3.2 机械臂3D打印机用材 11
2.3.3 打印过程存在的问题 12
第3章机械臂3D打印机运动学分析 14
3.1 运动学模型 14 [资料来源:http://doc163.com]
3.1.1 D-H参数 14
3.1.2 Dobot机械臂的D-H参数 15
3.2 运动学求解 17
3.2.1 齐次变换矩阵介绍 17
3.2.2正运动学求解 17
3.2.3 逆运动学求解 18
第4章机械臂3D打印机轨迹规划 20
4.1 机器人轨迹规划 20
4.2 笛卡尔空间轨迹规划 20
4.2.1 插补的方式 20
4.2.1插值算法 21
4.3 Matlab仿真Dobot轨迹规划 22
4.3.1 在Matlab中建立Dobot运动学模型 22
4.3.2 直线轨迹规划 23
4.3.3 圆弧轨迹规划 26
4.3.4 金子塔结构轨迹规划 27
第5章机械臂3D打印机ADAMS仿真 29
5.1 ADAMS仿真操作流程 29
5.2仿真的注意事项 29
5.2.1 Solidworks简化模型注意事项 29
5.2.2 ADAMS仿真注意的问题 30
5.3 仿真 30
5.4 仿真总结 33
第6章总结与展望 34
6.1 论文总结 34
6.2 经济性与环保性分析 34
6.3 课题展望 35
参考文献 36
附录 37
致谢 42
上一篇:车载双目视觉系统机械结构设计(含CAD图,CATIA三维图)
下一篇:凸轮轴磨床的结构及控制系统设计(含CAD零件装配图,电路图)