简易搬运机器人的设计(附程序代码,cad机械图,电路原理图和pcb图)
简易搬运机器人的设计(附程序代码,cad机械图,电路原理图和pcb图)论文14000字
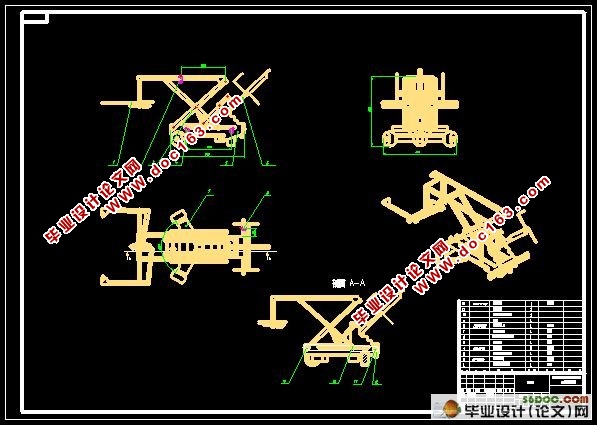
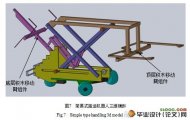
摘 要:简易搬运机器人是为ROBOCON2010年亚太机器人比赛而设计。设计在机械结构稳定性和控制系统模块化等方面进行总体优化。机械结构方面巧妙地运用了连杆机构和链传动装置。一方面解决了一个动力装置驱动两个机械手的运动(把预置方块搭建到Mankaura金字塔下边、取黄金块并放置到Mankaura金字塔的顶部);另一方面保证了机器人在动力装置工作过程中不因放置底层积木和抓取顶层积木块而产生过大偏移,导致机器人倾倒等。自动控制方面采用了模块化,主要有以AVR单片机ATmega128为核心的控制系统、空心杯直流减速电机伺服驱动系统、光电传感器采样系统、机械手驱动电机(舵机)控制系统、升降装置电机驱动系统等进行了总体设计。整个系统设计以较高的性价比,圆满完成了2010年亚太机器人比赛国内选拔赛的赛事,并取得了良好的战绩。
关键词:机器人;机械;控制;硬件;软件
Design of Facility Transfer Robot
Abstract:Facility transfer robot is designed for ROBOCON2010 robot competition in asia-pacific.The task is mainly to generally optimize the design in aspects of the mechanical structural maturation and the Control system modulation .Linkage mechanism and chain transmission device is used properly for the mechanical structure. On the one hand ,it sovles the operation that a power device drives two manipulator .On the other hand, it can make the robot's center of gravity not produce big migration and result in the robot falling . Because of the laying of the block in the progress of power plant working. The modulation is used in the automatic control aspect .Mainly has the modularized ATmega128 single-chip microcomputer with AVR core control system, for the hollow glass dc reduction motor servo drive system, photoelectric sensors sampling system, robots drive motor (steering gear) control system, placed square and take gold pieces of lifting devices motor drive system etc overall optimization design. The whole system succeed in 2010 Asian and Pacific robot competition domestic trials by high performance-to-price ratio. [资料来源:www.doc163.com]
Keywords:Robot; Machinery; Control; Hardware; Software
机器人主程序流程图
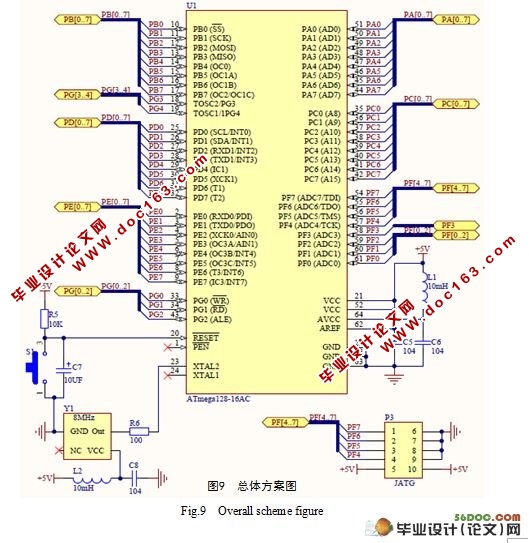
在本次机器人的软件设计过程中,为考虑整个机器人的协调、稳定、快速的运动,所以在整个的路径规划中我们采用部分机械结构的联动,比如:机器人的行走运动和机械手的升降运动、机器人的行走运动和底层积木移动臂组件放置黄金块运动、机器人的行走运动和顶层积木移动臂组件抓取金顶运动等。那么在软件当中对于实现部分机械结构联动就要充分利用单片机片上集成的外设,比如:片上集成的PWM功能。对于片上集成的外设在实际使用时,只要在程序开始的部位初始化一次就可以了,操作方便简单快捷,并且片上集成的外设在运行过程中近似可以独立于单片机的CPU工作。在CPU的资源分配上,降低开发的难度,提高了CPU效率。
[资料来源:http://Doc163.com]




[资料来源:www.doc163.com]