
基于慧鱼平台的自动化搬运系统设计与实现

资料介绍:
基于慧鱼平台的自动化搬运系统设计与实现(论文15000字)
摘 要
利用慧鱼创意模型组合包内的构件拼接的自动化搬运系统,主要是由自动化物料搬运设备和自动化物料存储设备构成,其中动力装置均由电机提供,通过慧鱼构件组搭建模型,然后通过慧鱼软件编程模拟仿真出自动化搬运系统的实际效果。
本人的课程设计是用德国慧鱼创意积木组合包内的构件为载体,搭建出自动化物料搬运设备和自动化物料存储设备的基本构架,再利用ROBO编程,通过TXT控制器面板去控制所搭建的模型,使搭建的模型达到预期的动作,完成搬运的和存储的功能,再而取代我们以后常用的由硬体描述语言所驱动的构架。本人的说明书重点是简明扼要的阐释机械之间的配合关系,各种传感器安装使用,软件编写,以及如何实现对电机的控制,让慧鱼软件平台的操作变得简单易懂,同时方便快捷,便于大家理解。
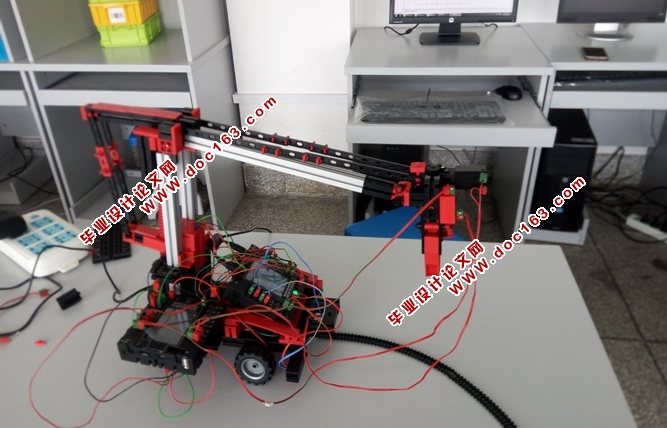
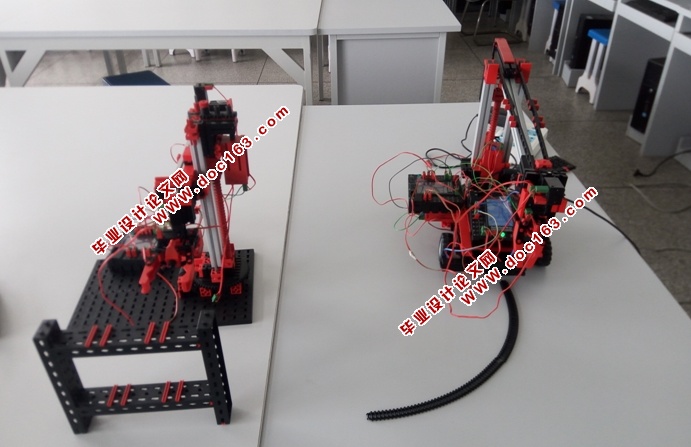
自动化物料搬运设备是循迹小车和搬运机械手臂的理想结合,通过传感器,实现从小车的循迹运动,到达预定的地点,到机械手臂完成货物搬运的过程。
自动化物料存储设备是利用传感器检测货架的闲置空间,然后将货物从固定的地点,用机械手臂搬运到闲置的空间,完成空间的合理分配。
[版权所有:http://DOC163.com]
关键词:慧鱼模型;循迹小车;传感器:机械手臂
ABSTRACT
The automatic moving system is composed of automatic moving robot, automatic sorting system and automatic storing and transporting robot. The power device is provided by motor, and the model is formed by the cometary components. Then the actual effect of the automatic moving system is simulated by the cometary programming.
This course is designed to use German fischer creative blocks combination of components as the carrier, build automated material handling equipment, and the basic framework of the automatic material storage equipment, recycling ROBO programming, through TXT controller panel to control the building model, to build the model of the desired action, complete the function of handling and storage, instead we commonly used later again driven by hardware description language structure. My manual focus is concise explanation cooperate relationship between the mechanical, various sensors installed, writing software, and how to realize the control of the motor, let fischer platform operation simple easy to understand, convenient and quick at the same time, to facilitate everybody understanding. [资料来源:http://doc163.com]
Automated material handling equipment is tracking the car and handling the ideal combination of mechanical arm, through the sensor, achieve tracking motion, from the car to a predetermined location, to the mechanical arm to complete the process of cargo handling.
Automation material storage device is to use the sensor testing shelf space, then the goods from a fixed location, with a robotic arm to the unused space, space distribution.
Key Words:Fischertechnic; Tour line; Sensor: A robotic arm
[来源:http://www.doc163.com]
目 录
摘 要 I
[资料来源:http://www.doc163.com]
ABSTRACT II
第1章 绪 论 1
1.1 选题背景及意义 1
1.2 自动化搬运系统的设计原则 2
1.3 自动化搬运系统的定位 3
1.4 自动化搬运系统的内容 4
第2章 慧鱼模型 5
2.1 慧鱼创意组合模型的简介 5
2.2 慧鱼创意组合模型的意义 5
2.3 慧鱼创意组合模型的主要构件 6
第3章 搬运系统的机械结构设计 10
3.1 自动化物料搬运设备 10
3.2 自动化物料存储设备 19
第4章 搬运系统的Robo Pro编程 23
4.1轨迹跟踪小车的软件编程 23
4.2摇臂式搬运手臂的软件编程 26
4.3三自由度搬运手臂程序的软件编程 30
第5章 结 论 32
参 考 文 献 33
附录1:外文翻译 34 [来源:http://Doc163.com]
附录2:外文原文 41 [来源:http://www.doc163.com]