
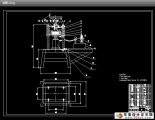
立柱式砖茶机设计(含CAD零件图和装配图)
立柱式砖茶机设计(含CAD零件图和装配图)(选题审批表,任务书,开题报告,中期检查表,论文说明书10400字,CAD图15张) 摘 要:世界上生产的散茶叶以条索、片状为主,紧压茶也只有蒸压后发酵的砖茶、沱茶,而没有绿茶的紧压茶,由于发酵砖茶,饮用时必须先将砖茶叶...

桥式起重机机械部分设计
桥式起重机机械部分设计(选题审批表,任务书,开题报告,中期检查表,论文说明书12100字,CAD图4张) 摘 要:桥式起重机是一种提高劳动生产率重要物品搬运设备,主要适应车间物品搬运、设备的安装与检修等用途。桥式起重机由桥架、小车运行机构、大车运行机构和电...

揉搓式全自动洗衣机设计及仿真
揉搓式全自动洗衣机设计及仿真(开题报告,中期检查表,论文说明书10200字,CAD图9张,视频) 摘 要:现有的洗衣机中最为常见的为波轮式洗衣机和滚筒式洗衣机。波轮式洗衣机是依靠波轮的转动来带动衣物和洗涤液进行洗涤;而滚筒式洗衣机是依靠滚筒的连续转动或定时...
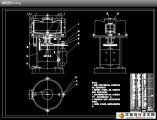
红薯去皮机的设计(含CAD零件图和装配图)
红薯去皮机的设计(含CAD零件图和装配图)(选题审批表,任务书,开题报告,中期检查表,论文说明书12000字,CAD图6张) 摘 要:主要介绍了以摩擦原理为基础的、适合食品加工工厂等场所使用的红薯去皮机的设计要点、工作原理和设备组成。不管任何形式的红薯加工,去皮...
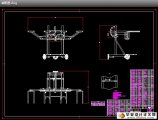
自动搬运机器人机械部分的设计(含CAD零件图和装配图)
自动搬运机器人机械部分的设计(含CAD零件图和装配图)(选题审批表,任务书,开题报告,中期检查表,论文说明书16000字,CAD图9张) 摘 要:随着国内外机器人竞赛热潮的兴起,大学生亲自动手制作机器人已成为参加机器人大赛的主要方式。本人作为湖南农业大学2011年亚...
小型水稻脱粒机设计(农业机械)(含CAD零件图和装配图)
小型水稻脱粒机设计(含CAD零件图和装配图)(任务书,开题报告,中期检查表,论文说明书15000字,CAD图10张) 摘 要: 为了满足湖南农村水稻脱粒生产的需要,设计一种针对湖南市场的水稻脱粒机已迫在眉睫,该水稻脱粒机可一次性完成脱粒、筛...

无动力滚刀式草坪修剪机设计(含CAD零件图和装配图)
无动力滚刀式草坪修剪机设计(含CAD零件图和装配图)(任务书,开题报告,中期检查表,论文说明书14200字,CAD图12张) 摘 要:草坪是现代社会的重要组成部分,也是社会文明及环境的重要标志。近年随着草坪面积的增加,对草坪的护养也随之增加。手推式草坪修剪机通过...
马铃薯杀秧机的设计(农业机械)
马铃薯杀秧机的设计(农业机械)(选题审批表,任务书,开题报告,中期检查表,论文说明书11600字,CAD图2张) 摘 要:马铃薯杀秧机主要用于马铃薯收获前的秧秆粉碎,以保证马铃薯的机械化收获。马铃薯杀秧机是结合我国配套动力及马铃薯收获工艺的实际情况设计的一种新...

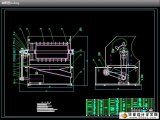
盘刀式铡草机设计(农业机械)(含CAD零件图和装配图)
盘刀式铡草机设计(农业机械)(含CAD零件图和装配图)(选题审批表,任务书,开题报告,中期检查表,论文说明书11300字,CAD图8张) 摘 要:随着畜牧业的发展,草饲料加工机械也得到了大力发展,铡草机是应用较广泛的草饲料加工机具之一,但该机具仍存在着切割过程中功率...
扫雪机的设计(含CAD零件图和装配图)
扫雪机的设计(含CAD零件图和装配图)(论文说明书8000字,CAD图10张) 摘 要:本文在分析了目前国内外的主要除雪方法的基础上,提出一种适合中国国 情的小型机械旋转式扫雪机的设计方案。本设计由汽油机提供动力。经输出轴输出动力,通过链传动传递动力,带动其...