
工业搬运机械手设计(机身采用摆动缸传动)
摘 要
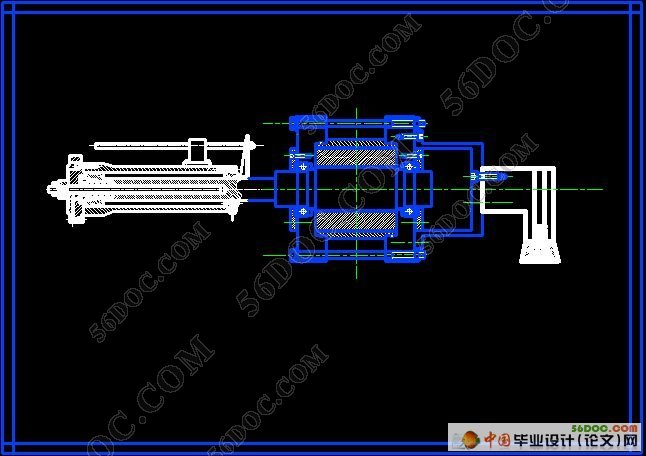
工业机械手的主要功能是以机械来实现人的动作。它具有独立的控制系统、程序可变、动作灵活多样的特点。本文中的机械手主要由手部和运动机构组成。手部是用来抓持工件的部件,运动机构可以使手部完成各种转动(摆动)、移动或复合运动来实现预定的动作,改变被抓持物件的位置和姿势。
本文主要是设计一种实现生产中搬运工件到达指定地点的专用机械手。这种机械手力图结构简单,能满足多种相似工件的工作要求。机械手臂部采用摆动液压缸实现周转,带动手部同步周转,机身采用液压缸驱动实现对工件的往返运动。设计的重点是机械手的机械执行部分和传动部分,主要包括两个液压缸缸和吸盘式手部的设计。
关键词: 工业机械手,摆动液压缸,吸盘式手部
ABSTRACT
Industrial machinery hand is the main function of machinery to achieve the action. It has independent control systems, procedures variable, action flexible and diverse characteristics. This paper in the main manipulator by the hand and sports institutions. Grasp the hand is holding the workpiece components, sports organizations can complete a variety of hand rotation (swing), move or movement of action to achieve the target, changing the location of grasping objects and gestures. [资料来源:www.doc163.com]
This paper is designed to achieve a production of porters, arrived at the designated location of the special manipulator. This mechanical hand trying to structure is simple and can meet a variety of similar parts of the job requirements. Mechanical arm swing of the hydraulic cylinders used to achieve turnover, driven simultaneously working hand, the fuselage using hydraulic cylinders on the part of the drive to achieve from the campaign. The focus is the mechanical design of the mechanical hand and drive the implementation of some parts, including the two hydraulic cylinders and cylinder sucker-hand design.
Keywords: Industrial machinery hand,Swing hydraulic cylinder,Sucker-hand
机械手总体设计
机械手的种类:按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。参考文献《工业机器人应用工程》有:
1)运动设计:
设计主要参数时可以分步进行:首先要根据机械手每个自由度的最大行程绘出机械手的最大工作范围。然后根据给定的运动节拍分配每个运动的时间, 总的运动时间应小于或等于工作节拍。在工作节拍短、动作多的情况下, 几个动作同时进行时, 按时间较长的计算。最后要注意定位精度取决于手臂的刚度、缓冲装置的形式和定位方法。 [资料来源:Doc163.com]
2)驱动系统的选择: 驱动系统有液压驱动、气压驱动、电机和机械联动四种。
液压驱动和气压驱动较为通用;步进或伺服电机可用于程序复杂、运动轨迹要求严格的小型通用机械手;异步电机、直流电机适用于抓重大、速度低的专用机械手;机械联动适用于自由度少、速度快的专用机械手。
在以上两个大的方向上先确定机械手的草图方案,实现以摆动缸驱动的机械手系统,然后进行组合、计算、校核并试验完成。
确定手部结构
根据设计要求,本设计采用吸盘式手部结构。由于所持工件为平板状,材质为玻璃,且重量为5至10千克。故可采用真空泵式空气负压吸盘手部结构,即真空泵抽真空的方法吸附工件,通过真空泵电磁阀系统控制真空的形成以及大气压与内压的连通来吸附和释放工件。
[资料来源:http://Doc163.com]

[来源:http://www.doc163.com]

目录 15000字
第1章 绪论 1
1.1工业机械手的应用发展现状 1
1.2工业机械手结构设计的原理和分类 1
1.3机械手总体设计 2
第2章 机械手的手部设计 3
2.1确定手部结构 3
2.2真空泵式空气负压吸盘手部部件构成及工作原理 3
2.3真空泵式空气负压吸盘手部的工作过程 5
2.4真空泵式空气负压吸盘手部各部件的结构设计与选用 5 [来源:http://Doc163.com]
2.4.1真空吸盘的设计 5
2.4.2真空泵的选用 8
2.4.3喷嘴的设计 13
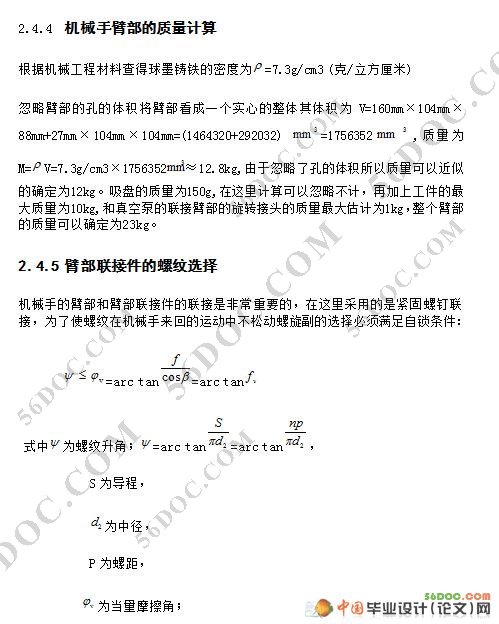
2.4.4 机械手臂部的质量计算 14
2.4.5 臂部连接件的螺纹选择 14
2.4.6 臂部螺钉组连接设计 15
2.4.7 手部连接件的设计 18
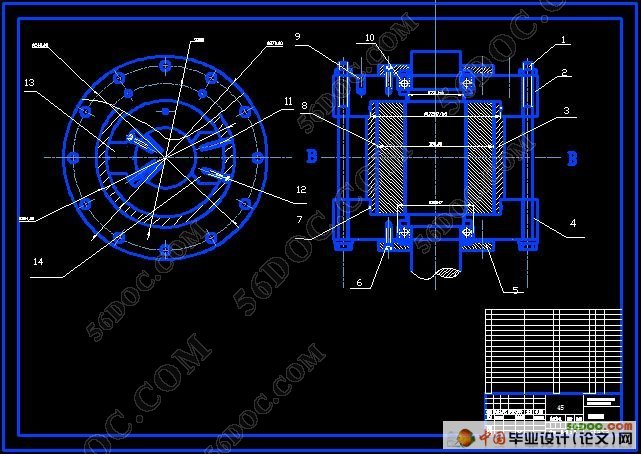
第3章 摆动液压缸的设计 18
3.1摆动液压缸的初步选择 19
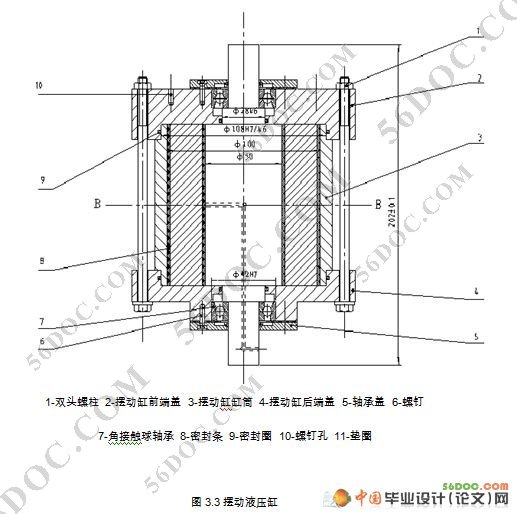
3.2 液压摆动缸的原理和结构 19
3.3 液压摆动缸的受力分析 20
3.4转矩的计算 20
3.5单叶片摆动液压缸基本尺寸的确定 21
3.6单叶片摆动液压缸主要零部件的设计 23
3.6.1中心轴的选择 23
3.6.2轴承的选择 24
3.6.3摆动液压缸缸筒的设计 26
3.6.4缸壁厚度的计算 26
3.6.5拉杆螺钉的设计 27
第4章 单活塞推力液压缸的设计 29
[资料来源:http://www.doc163.com]
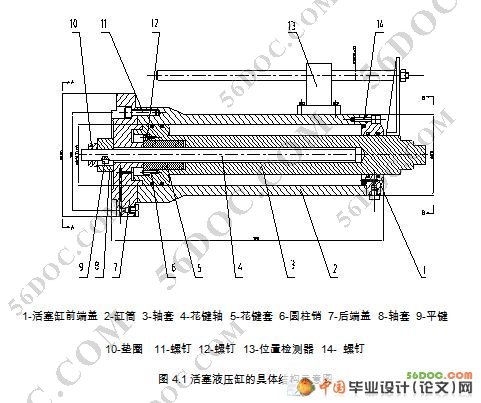
4.1活塞液压缸的总体设计 29
4.2活塞液压缸的各部件的设计 30
4.2.1确定液压缸的外负载力 30
4.2.2 计算缸筒内径 30
4.2.3活塞杆强度的校核 31
4.2.4液压缸的安装方式 33
4.2.5计算缸筒壁厚 33
4.2.6确定活塞的结构型式以及其与活塞杆的连接方式 34
4.2.7花键套的设计 35
4.2.8密封装置的选择 36
第5章 手部和机身连接件的设计 37
5.1摆动缸和活塞缸的连接 38
5.2摆动缸和手部的连接 39
结 论 41
参考文献 42
致 谢 43 [资料来源:https://www.doc163.com]
下一篇:脉冲电浮水处理池的设计