
ЩНВшВЩеЊЦНЬЈЩшМЦбаОП(КЌГЬађ,дРэЭМ,cadСуМўЭМКЭзАХфЭМ)

1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.НіЙЉбЇЯАВЮПМжЎгУ.
Ум Лн БЃ АяжњжааФ
ЩНВшВЩеЊЦНЬЈЩшМЦбаОП(КЌГЬађ,дРэЭМ,cadСуМўЭМКЭзАХфЭМ)(КЌбЁЬтЩѓХњБэ,ШЮЮёЪщ,ПЊЬтБЈИц,жаЦкМьВщБэ,ТлЮФЫЕУїЪщ17000зж,CADЭМжН6еХ)
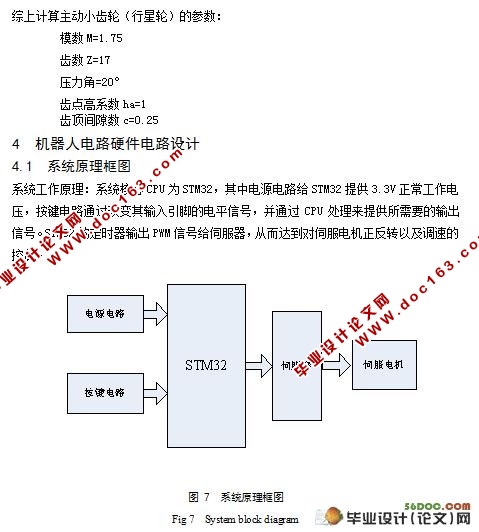
еЊ вЊЃКЫцзХЙњФкЭтВЩеЊЛњЦїШЫЕФаЫЦ№ЃЌ21ЪРМЭЪЧХЉвЕЛњаЕЛЏЯђжЧФмЛЏЗНЯђЗЂеЙЕФживЊРњЪЗЪБЦкЃЌЛњаЕзївЕвбж№ВННјШыХЉвЕЩњВњСьгђЁЃБОЮФбаОПЩшМЦСЫФмМѕЧсШЫЙЄРЭЖЏ ЧПЖШКЭЬсИпЙЄзїаЇТЪЕФЩНВшВЩеЊЦНЬЈЃЌЦНЬЈгЩжїПиФЃПщЁЂаазпФЃПщЃЈШЋЯђТФДјЃЉКЭЩ§НЕФЃПщзщГЩЁЃЯЕЭГвдSTM32ЮЊКЫаФПижЦЦїЃЌЭЈЙ§ЖдЫХЗўЕчЛњЕФПижЦПЩЪЕЯжВЩ еЊЦНЬЈЕФаазпПижЦКЭЩ§НЕПижЦЁЃБОЮФНсКЯгЩТСаЭВФжЦзїЕФВЩеЊЦНЬЈЕФЪЕЮяФЃаЭЖдЯЕЭГЕФЩшМЦНјааСЫЗжЮіКЭзмНсЁЃ
ЙиМќДЪЃКЛњЦїШЫЃЛХЉвЕЛњаЕЛЏЃЛВЩеЊЦНЬЈЃЛШЋЯђТФДј
Design and research of the camellia picking platform
Abstract: With the rise of the picking robot at home and abroad, the 21st century is an important historical period of the mechanization of agriculture to the intelligent direction, the robot has gradually entered the field of agricultural production. This study design can reduce labor intensity and improve the efficiency of the camellia picking platform, This picking platform by walking module(Omni-track), lifting module and main control module. The system use the STM32 as the core controller. The control of servomotor can be achieved walking and lifting of the picking platform. The design of the physical model produced by the aluminum picking platform system was analyzed and summarized in this paper. [АцШЈЫљгаЃКhttp://DOC163.com]
Key words: Robot; mechanization of agriculture; picking platform; Omni-track
ЩНВшВЩеЊЦНЬЈЩшМЦЗНАИ
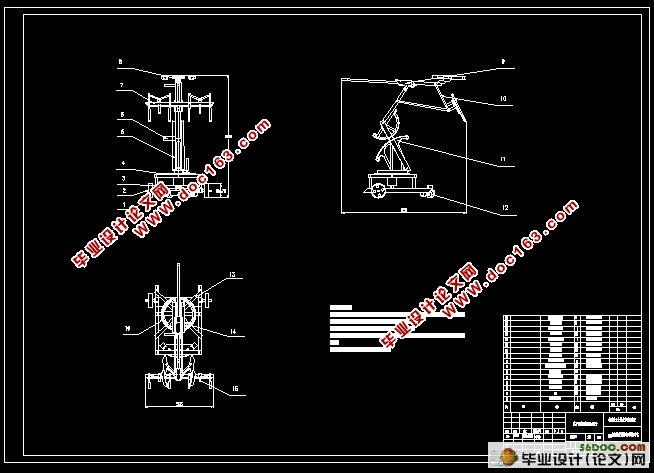
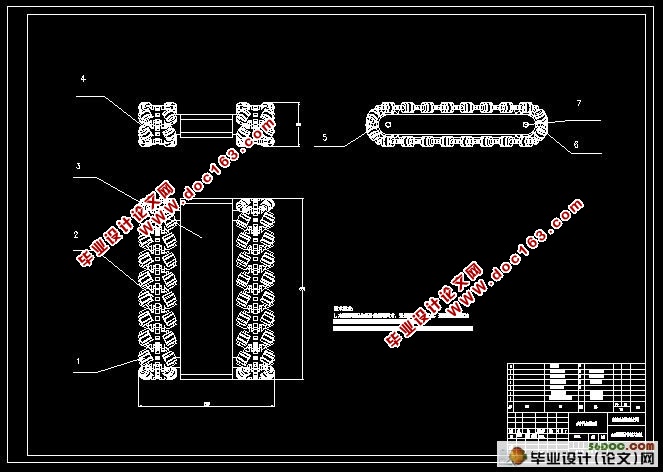
ЖдгкжЧФмПЩЩ§НЕЪНвЦЖЏЦНЬЈРДЫЕЃЌЦфжївЊадФмЪЧЦНЬЈдЫааЙ§ГЬжаЕФЮШЖЈадЁЂзМШЗадЁЂАВШЋадвдМАПЩВйзїадЁЃЭЈЙ§бЇЯАКЭзмНсвдЭљЕФИїжжВњЦЗЃЌФтЖЈСЫВЩеЊЦНЬЈЕФЩшМЦЗНАИШчЯТ:
1ЁЂвЦЖЏЕзХЬВЩгУзджїбаОПЩшМЦЕФЩНЕиаазпЯЕЭГгУШЋЯђТФДјЃЌЪЙВЩеЊЦНЬЈЪЪгУгкЩНЧјЕиаЮЃЌЖјЧвдкЦТЕиаазпЕФзЊЯђЙ§ГЬжаЮоашЕїећТФДјЕФГЏЯђЃЌНЕЕЭСЫВйзїЕФИДдгЖШЃЌЬсИпСЫаазпЕФЮШЖЈадЁЃ
2ЁЂЩ§НЕЛњЙЙВЩгУаааЧГнТжФіКЯелЕўЪНЩ§НЕНсЙЙЃЌЦфОпгаЩ§НЕЦНЮШзМШЗЁЂдЫЪфзДЬЌГпДчаЁЁЂАВШЋПЩППЕШгХЕуЃЌНсЙЙНєДеЪЙЦфЩњВњзївЕЧсЫЩздШчЁЃ
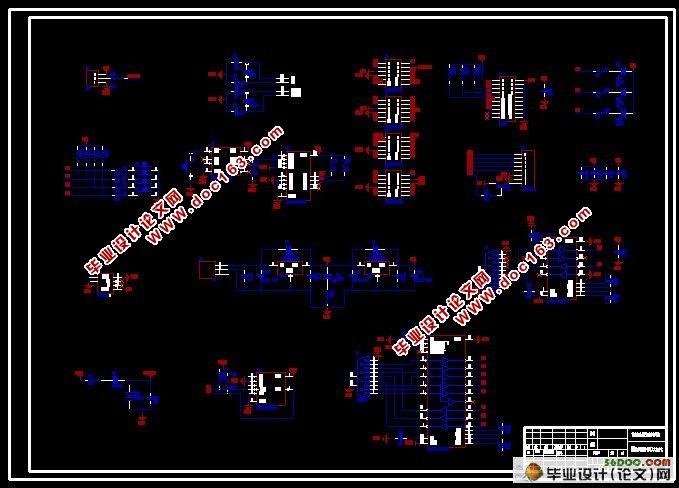
3ЁЂПижЦЯЕЭГжїПиаОЦЌВЩгУSTM32ЯЕСаЃЌЦфаОЦЌИпадФмЁЂЕЭГЩБОЁЂЕЭЙІКФЕФЧЖШыЪНгІгУЕШЬиЕуЃЌдкИДдгЕФзївЕжаИќЮШЖЈКЭЪЕгУвдМАЗНБуЙЄвЕЗНУцЕФИФзАЁЃ
2.3 бажЦИХвЊ
ПЮЬтвЊЧѓЩшМЦЩНВшВЩеЊЦНЬЈЃЌФПЕФЪЧМѕЧсШЫЙЄЕФРЭЖЏЧПЖШЃЌЬсИпЙЄзїаЇТЪЁЃЯЕЭГжївЊАќКЌвдЯТФкШнЃК
1. ВЩеЊЦНЬЈЕФЕзХЬНсЙЙЩшМЦЃКвЊЧѓНсКЯЩНВшЩњГЄЧјЕФЕигђЬиЕуЃЌЩшМЦЪЪКЯгкИУЕиаЮаазпЕФЕзХЬНсЙЙЃЌВЂЧвОпгаНЯЧПЕФИКдиФмСІЁЃ
2. ВЩеЊЦНЬЈЕФЩ§НЕНсЙЙЩшМЦЃКвЊЧѓНсКЯЩНВшЪїЕФЭтаЮГпДчЬиеїЃЌЩшМЦОпгавЛЖЈааГЬЕФЩ§НЕЯЕЭГЃЌЪЕЯжВЩеЊЦНЬЈЕФЩЯЩ§гыЯТНЕЃЌвдДяЕНЗНБуВЩеЊЩНВшЕФФПЕФЁЃ
3. ВЩеЊЦНЬЈЕФЕчЦјПижЦЯЕЭГЩшМЦЃКНсКЯИїЕЅдЊЕФЛњаЕНсЙЙЃЌЩшМЦЖдгІЕФЕчЦјПижЦЯЕЭГЪЕЯжЖдЯргІЖЏзїЕФПижЦЁЃ
жївЊФкШнЃК
ПЮЬтвЊЧѓЩшМЦЩНВшВЩеЊЦНЬЈЃЌФПЕФЪЧМѕЧсШЫЙЄЕФРЭЖЏЧПЖШЃЌЬсИпЙЄзїаЇТЪЁЃЯЕЭГжївЊАќКЌвдЯТФкШнЃК
1.ВЩеЊЦНЬЈЕФЕзХЬНсЙЙЩшМЦ
вЊЧѓНсКЯЩНВшЩњГЄЧјЕФЕигђЬиЕуЃЌЩшМЦЪЪКЯгкИУЕиаЮаазпЕФЕзХЬНсЙЙЃЌВЂЧвОпгаНЯЧПЕФИКдиФмСІЁЃ
2.ВЩеЊЦНЬЈЕФЩ§НЕЯЕЭГНсЙЙЩшМЦ
вЊЧѓНсКЯЩНВшЪїЕФЭтаЮГпДчЬиеїЃЌЩшМЦОпгавЛЖЈааГЬЕФЩ§НЕЯЕЭГЃЌЪЕЯжВЩеЊЦНЬЈЕФЩЯЩ§гыЯТНЕЃЌвдДяЕНЗНБуВЩеЊЩНВшЕФФПЕФЁЃ
3.ВЩеЊЦНЬЈЕФЕчЦјПижЦЯЕЭГЩшМЦ
НсКЯИїЕЅдЊЕФЛњаЕНсЙЙЃЌЩшМЦЖдгІЕФЕчЦјПижЦЯЕЭГЪЕЯжЖдЯргІЖЏзїЕФПижЦЁЃ
[зЪСЯРДдДЃКDoc163.com]
ФП ТМ [зЪСЯРДдДЃКwww.doc163.com]
еЊ вЊ 1
ЙиМќДЪ 1
1 ЧАбд 1
1.1 баОПвтвхгыФПЕФ 2
1.2 ЙњФкЭтбаОПЯжзД 2
2 ЩНВшВЩеЊЦНЬЈДДвтЩшМЦгыЗНАИ 6
2.1 ЛњЦїШЫвЛАузщГЩ 6
2.2 ЩНВшВЩеЊЦНЬЈЩшМЦЗНАИ 6
2.3 бажЦИХвЊ 7
3 ВЩеЊЦНЬЈЛњаЕЩшМЦ 7
3.1 ЕзХЬЕФЩшМЦ 7
3.1.1 Лљгк45°ШЋЯђТжЕФЗжЮі 7
3.1.2 вЛжжЩНЕиаазпЯЕЭГгУШЋЯђТФДј 10
3.2 Щ§НЕЛњЙЙЕФЩшМЦ 11
4 ВЩеЊЦНЬЈЕчТЗгВМўЕчТЗЩшМЦ 13
4.1 ЯЕЭГдРэПђЭМ 13
4.2 ВЩеЊжїПижЦАхНсЙЙМАЫЕУї 13
4.2.1зюаЁЯЕЭГ 14
4.2.2 жїПижЦАхЪЕЮяЭМ 14
4.3 ЕчдДФЃПщ 15
4.4 ЫХЗўЕчЛњЧ§ЖЏЕчТЗ 16
4.5 АДМќЕчТЗ 20
[зЪСЯРДдДЃКhttp://doc163.com]
5 жїПижЦАхГЬађЩшМЦ 21
5.1 ЯЕЭГжїГЬађСїГЬЭМ 21
5.2 PWMЕФВњЩњ 21
5.2.1 ШэМўЩњГЩPWM 21
5.2.2 гВМўЩњГЩPWM 23
6 ЯЕЭГЕФЕїЪд 25
7 зм Нс 25
ВЮПМЮФЯз 25
жТ аЛ 26
ИНТМ 27
ИНТМ
ИНТМ1ЃКЯЕЭГГЬађ
ИНТМ2ЃКЕчТЗдРэЭМ
ИНТМ3ЃКЯЕЭГЛњаЕЩшМЦзАХфМђЭМ
ЩЯвЛЦЊЃКМЄЙтЫЎЦНвЧЯЕЭГЩшМЦ(КЌЛњаЕЭМ,ЕчТЗЭМ,ProeШ§ЮЌЭМ)Ёю
ЯТвЛЦЊЃКЖўЮЌВННјЕЅЦЌЛњПижЦЙЄзїЬЈЛњаЕЯЕЭГЩшМЦ(КЌcadСуМўЭМКЭзАХфЭМ)