
ЫФзуЛњЦїШЫЕЅЭШНсЙЙЩшМЦМАЦфЛљДЁЕчЛњПижЦЯЕЭГбаОП(КЌCADЭМ,SolidWorksШ§ЮЌ

1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.НіЙЉбЇЯАВЮПМжЎгУ.
Ум Лн БЃ АяжњжааФ
ЫФзуЛњЦїШЫЕЅЭШНсЙЙЩшМЦМАЦфЛљДЁЕчЛњПижЦЯЕЭГбаОП(КЌCADЭМ,SolidWorksШ§ЮЌЭМ)(ШЮЮёЪщ,ПЊЬтБЈИц,ЭтЮФЗвы,ТлЮФЫЕУїЪщ20000зж,CADЭМ16еХ,SolidWorksШ§ЮЌЭМ,DSPЕчЛњПижЦГЬађ,Simulink,Д№БчPPT)
еЊвЊ
дкШчНёПЦбЇММЪѕХюВЊЗЂеЙЕФЪБДњЃЌЫФзуЛњЦїШЫж№НЅГЩЮЊСЫЛњЦїШЫбаОПСьгђЕФвЛЯюШШУХЃЌЦфЮДРДЧПДѓЕФЙІФмКЭЧБдкЕФЩчЛсМлжЕЖМЪЧПЩвддЄМћЕФЁЃ
БОЮФвдЫФзуЛњЦїШЫЛњаЕЕЅЭШЮЊбаОПЖдЯѓЃЌЯШВЮПМСЫЩњЮяШЎРрЭШВПЙЧїРНсЙЙКЭдЫЖЏЬиадЃЌвдНсЙЙЯрЫЦЁЂдЫЖЏЯрЫЦЁЂЕЭЙпСПЮЊЩшМЦддђЃЌЩшМЦГіЛњаЕЭШЕФжЋЖЮНсЙЙЃЌВЂЖдЦфНјааСЫдЫЖЏбЇЗжЮіЁЃЫФзуЛњЦїШЫЛњаЕЕЅЭШВЩгУСНИіЖРСЂЕФЮоЫЂжБСїЕчЛњПижЦЯЕЭГЃЌвЛИіПижЦЛњаЕЭШЕФїХЙиНкЃЌСэвЛИіПижЦЛњаЕЭШЕФЯЅЙиНкЃЌСНЬЈЕчЛњжУгкїХВПжЎЩЯЁЃЮоЫЂжБСїЕчЛњЕФПижЦЯЕЭГвдTMS320F28335 DSPзїЮЊПижЦЦїЃЌДюХфШ§ЯраЧаЭСЊНгШЋЧХЧ§ЖЏЕчТЗ,ВЩгУЫйЖШ-ЕчСїЫЋБеЛЗПижЦВпТдЃЌPIDЫуЗЈВЩгУдіСПЪНЫуЗЈЁЃ
дкДЫПижЦПђМмЯТЃЌЯШКѓгУШэМўНЈФЃЗТецКЭгВМўЪЕбщЕФЗНЗЈЃЌЪЕЯжСЫЕчЛњЕФПижЦЃЌВЂбщжЄСЫПижЦЯЕЭГЕФЫйЖШЯьгІЁЂЮШЖЈадЁЂПЙИЩШХФмСІЕШЃЌЕУЕНгыРэТлЗжЮіЯрНќЕФНсЙћЁЃ
БОЮФЕФбаОПГЩЙћЮЊвдКѓдкзуЪНЛњЦїШЫКЭЕчЛњПижЦСьгђЕФбЇЯАДђЯТСЫживЊЕФЛљДЁЁЃ
ЙиМќДЪЃКЫФзуЛњЦїШЫЃЛЛњаЕЕЅЭШНсЙЙЩшМЦЃЛЮоЫЂжБСїЕчЛњЃЛDSPЃЛЫЋБеЛЗПижЦ [РДдДЃКhttp://www.doc163.com]
Abstract
In the era of booming development of science and technology, quadruped robot has gradually become a hot topic in the field of robot research. Its powerful functions and potential social values can be predicted in the future.
This paper takes the mechanical single leg of quadruped robot as the research object, first referred to the biological dog leg bone structure and motion characteristics, with the structure similar, movement similar, low inertia as the design principle, made a design of the mechanical leg segment structure, and analysed its kinematic performance. The mechanical single leg uses two independent brushless dc motor control systems, one for them controls the hip joint of the robot leg and the other for the knee joint of the robot leg. The two motors are placed on the hip. The motor control system takes F28335 DSP as the controller, three-phase star-connected full-bridge drive circuit as the driver, adopts the speed-current double closed-loop control strategy, and the PID algorithm adopts the incremental algorithm. [зЪСЯРДдДЃКhttp://Doc163.com]
Under this control framework, the control of the motor is realized by software modelingЁЂ simulation and hardware experiment successively, and the speed response, stability and anti-interference ability of the control system are verified. The results are close to the theoretical analysis.
The research results of this paper lay an important foundation for the future study in the field of foot robot and motor control.
Key WordsЃКquadruped robot; mechanical single leg structure design; brushless DC motor; DSP; double closed loop control
БОЮФжївЊНсЙЙ
ДгБОЮФЕФбаОПФкШнГіЗЂЃЌНЋШЋЮФЛЎЗжЮЊЮхИіеТНкНјааТлЪіЃЌОпЬхШчЯТЃК
ЕквЛеТЃКаїТлЁЃВћЪіБОЮФЕФбаОПБГОАКЭвтвхЁЃНсКЯЮФЯззЪСЯЃЌНщЩмЙњФкЭтЫФзуЛњЦїШЫЗЂеЙЯжзДЃЌШЗЖЈБОЮФЕФбаОПФкШнКЭбаОПФПБъЁЃ
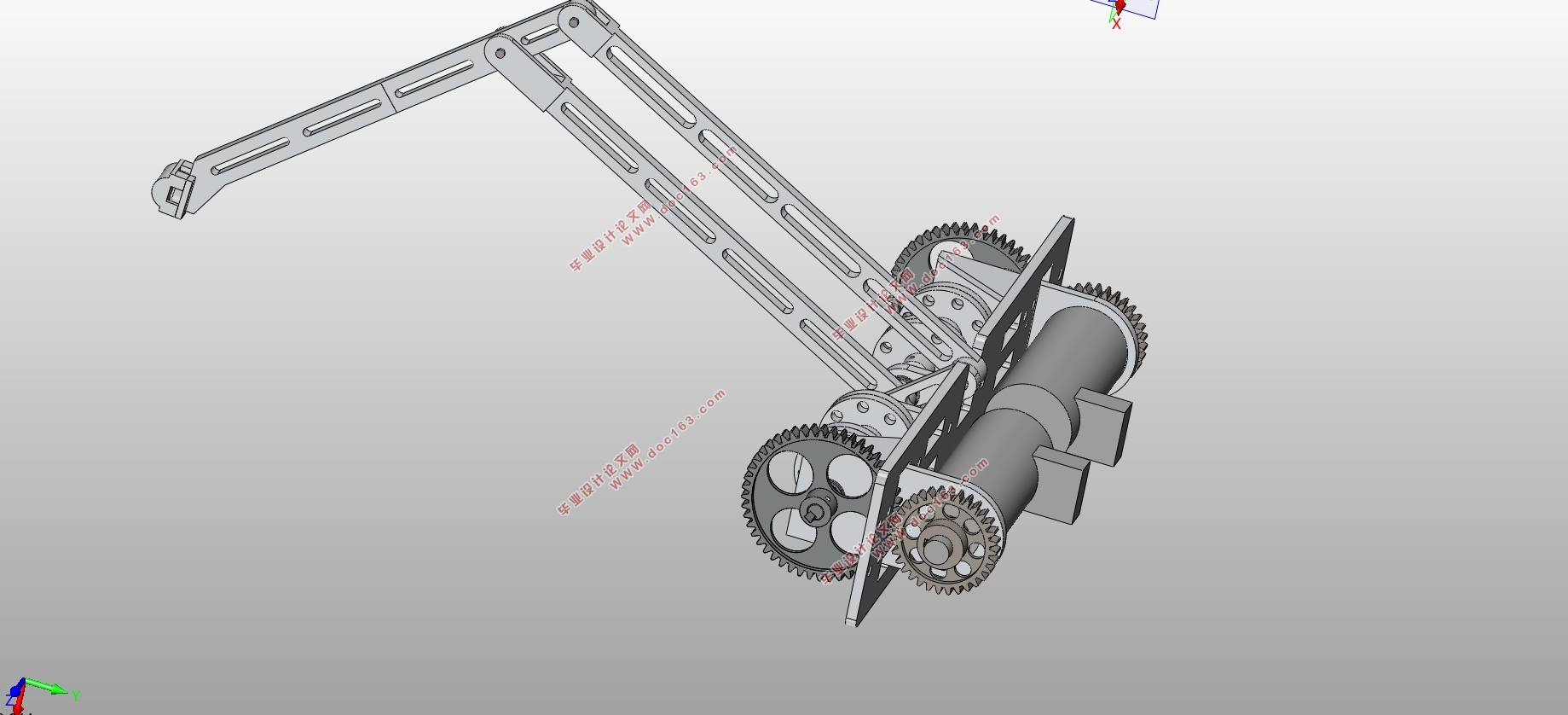
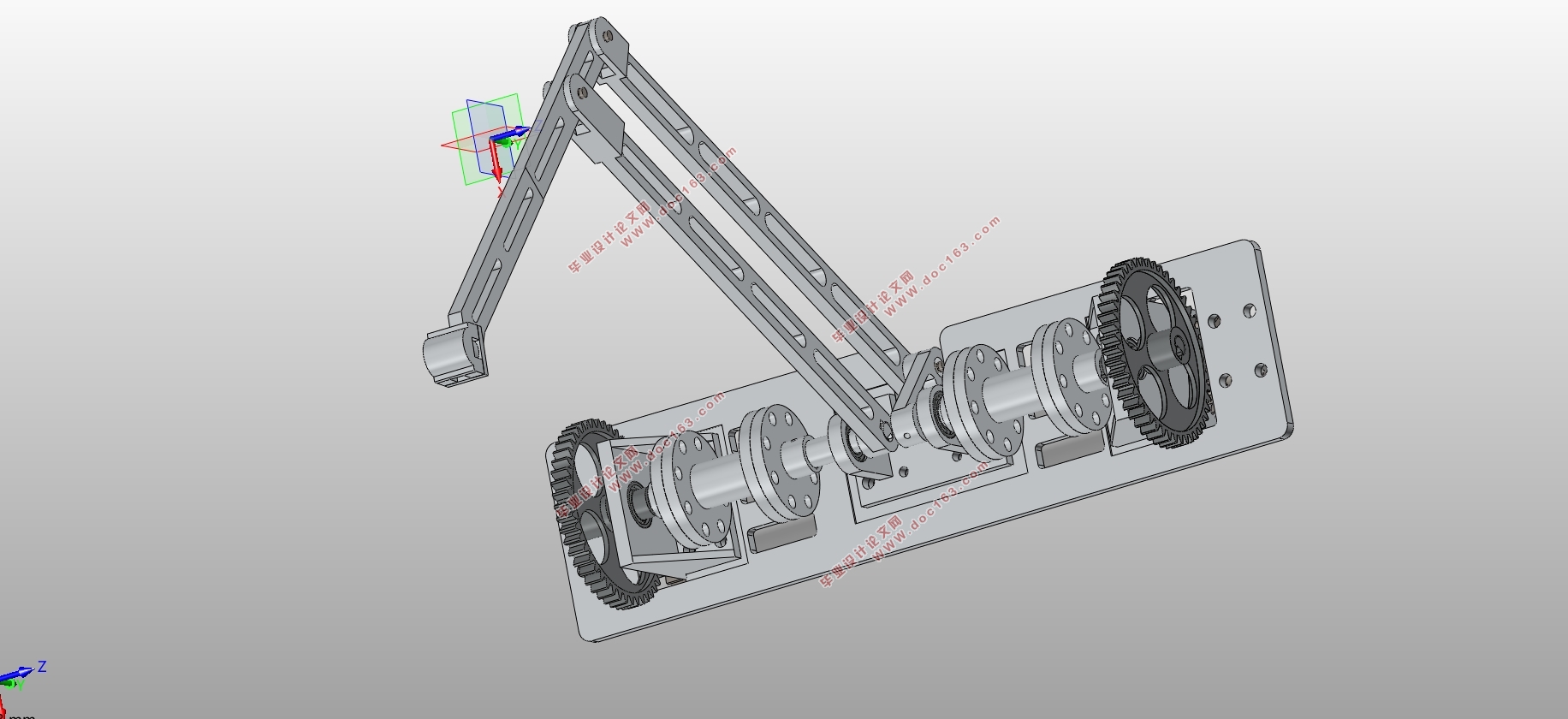
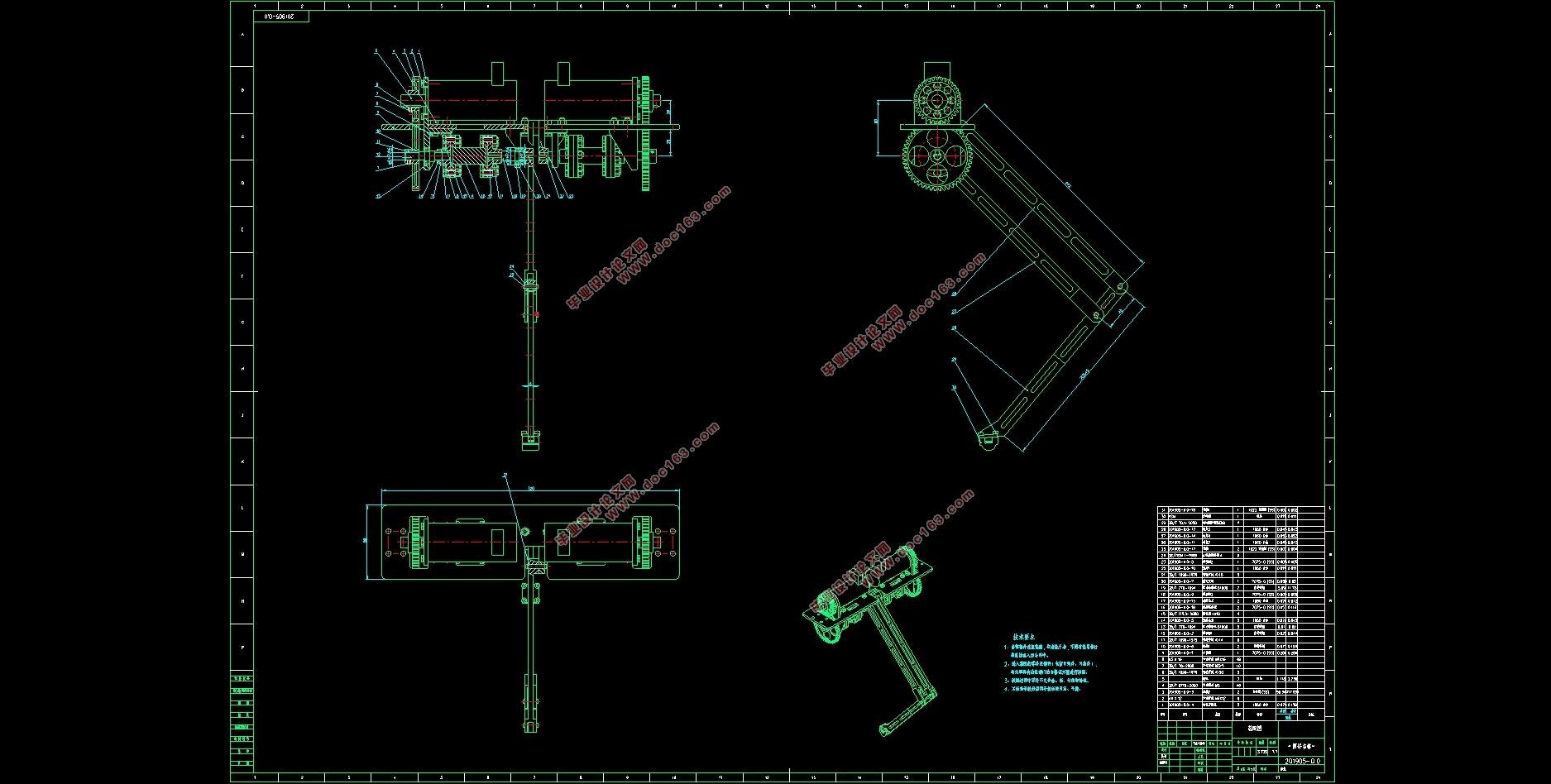
ЕкЖўеТЃКЫФзуЛњЦїШЫЛњаЕЕЅЭШНсЙЙЩшМЦМАдЫЖЏбЇЗжЮіЁЃЛљгкЩњЮяШЎЕФЩњРэНсЙЙКЭдЫЖЏЬиЕуЃЌЩшМЦЫФзуЛњЦїШЫЕФЕЅЭШНсЙЙЁЃИљОнНсЙЙНјаае§ЯђдЫЖЏбЇЗжЮіКЭФцЯђдЫЖЏбЇЗжЮіЁЃ
ЕкШ§еТЃКЫФзуЛњЦїШЫЛњаЕЕЅЭШЛљДЁЕчЛњПижЦЯЕЭГЩшМЦЁЃЪзЯШНЈСЂСЫећЬхПижЦПђМмКЭЫЋБеЛЗЕФПижЦВпТдЁЃШЛКѓРћгУMATLABШэМўНјааСЫНЈФЃКЭЗТецЗжЮіЃЌзюКѓДюНЈСЫгВМўПижЦЕчТЗКЭЭъГЩСЫПижЦГЬађЩшМЦЁЃ [зЪСЯРДдДЃКhttp://Doc163.com]
ЕкЫФеТЃКЮоЫЂжБСїЕчЛњПижЦЪЕбщЁЃЭЈЙ§жЎЧАЫљДюНЈЕФЪЕбщЦНЬЈЃЌНјааСЫЮоЫЂжБСїЕчЛњЫйЖШЯьгІЁЂЯрЕчСїЯрЕчбЙВЩМЏЁЂPWMПижЦаХКХВЩМЏЕШЪЕбщЃЌбщжЄЯЕЭГЕФадФмЁЃ
ЕкЮхеТЃКзмНсгыеЙЭћЁЃзмНсСЫБОЦЊЮФеТШЁЕУЕФбаОПГЩЙћЃЌВЂжИГіСЫЯТвЛВНЫљашЕФгХЛЏКЭЙЄзїЁЃ
[зЪСЯРДдДЃКhttps://www.doc163.com]

 [зЪСЯРДдДЃКhttps://www.doc163.com]
[зЪСЯРДдДЃКhttps://www.doc163.com] 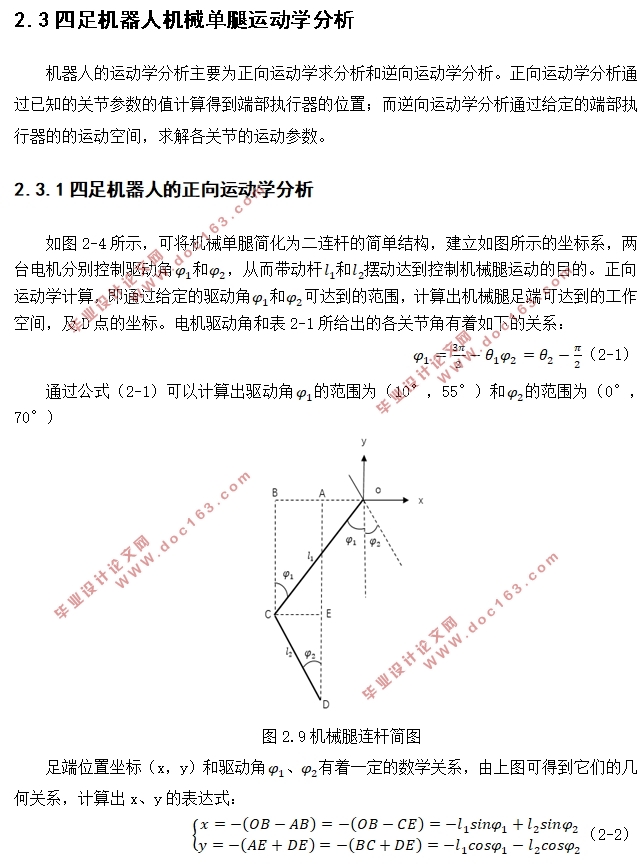

[зЪСЯРДдДЃКhttp://Doc163.com]
ФПТМ
ЕквЛеТ аїТл 1
1.1баОПБГОАгывтвх 1
1.2ЫФзуЛњЦїШЫЙњФкЭтбаОПЯжзД 2
1.2.1ЙњЭтбаОПЯжзДЗжЮі 2
1.2.2ЙњФкбаОПЯжзДЗжЮі 3
1.3баОПЕФжївЊФкШнКЭФПБъ 3
1.4БОЮФжївЊНсЙЙ 4
ЕкЖўеТ ЫФзуЛњЦїШЫЛњаЕЕЅЭШНсЙЙЩшМЦМАдЫЖЏбЇЗжЮі 5
2.1ШЎРрЭШВПЩњРэНсЙЙКЭЙиНкдЫЖЏЬиЕуЗжЮі 5
2.1.1ШЎРрЭШВПЩњРэНсЙЙ 5
2.2.2ШЎРрЭШВПЙиНкдЫЖЏЬиад 5
2.2ЫФзуЛњЦїШЫЛњаЕЕЅЭШНсЙЙЩшМЦ 6
2.2.1ЩшМЦддђ 6
2.2.2ЫФзуЛњЦїШЫЛњаЕЕЅЭШНсЙЙМАИїЯюВЮЪ§ЕФШЗЖЈ 6
2.3ЫФзуЛњЦїШЫЛњаЕЕЅЭШдЫЖЏбЇЗжЮі 10
2.3.1ЫФзуЛњЦїШЫЕФе§ЯђдЫЖЏбЇЗжЮі 10
2.3.2ЫФзуЛњЦїШЫЕФФцЯђдЫЖЏбЇЗжЮі 11
2.4БОеТаЁНс 12
Ек3еТ ЫФзуЛњЦїШЫЛњаЕЕЅЭШЕФПижЦЯЕЭГЩшМЦ 13 [АцШЈЫљгаЃКhttp://DOC163.com]
3.1ЮоЫЂжБСїЕчЛњФкВПНсЙЙМАПижЦдРэ 13
3.1.1ЮоЫЂжБСїЕчЛњФкВПНсЙЙ 13
3.1.2ЮоЫЂжБСїЕчЛњЧ§ЖЏдРэ 14
3.2ЛљгкDSPЕФЮоЫЂжБСїЕчЛњПижЦЯЕЭГПижЦЗНАИ 15
3.2.1ЛљгкDSPЕФЮоЫЂжБСїЕчЛњПижЦгыЧ§ЖЏЕчТЗ 15
3.2.2ЮоЫЂжБСїЕчЛњЫЋБеЛЗПижЦВпТд 16
3.3ЛљгкMATLABЕФЮоЫЂжБСїЕчЛњПижЦЯЕЭГНЈФЃгыЗТец 18
3.3.1ПижЦЯЕЭГПЊЛЗЪ§бЇФЃаЭМЦЫуМАЗжЮі 18
3.3.2ПижЦЯЕЭГЕФSimulinkНЈФЃКЭЗТец 21
3.4ПижЦЯЕЭГЕФгВМўЕчТЗМАПижЦаХКХВЈаЮХфжУ 24
3.4.1ПижЦЦїКЭЧ§ЖЏЦїЕФбЁдёМАЕчТЗСЌНг 24
3.4.2ПижЦаХКХВЈаЮХфжУ 26
3.5ПижЦЯЕЭГШэМўГЬађЩшМЦ 28
3.5.1жїГЬађЩшМЦ 29
3.5.2 eCAPВЖЛёжаЖЯЗўЮёГЬађЩшМЦ 29
3.5.3 ADCВЩМЏжаЖЯЗўЮёГЬађЩшМЦ 31
3.6БОеТаЁНс 32
ЕкЫФеТ ЮоЫЂжБСїЕчЛњЕФDSPПижЦЪЕбщ 33
4.1ЮоЫЂжБСїЕчЛњВтЫйЪЕбщ 33
4.2 PWMаХКХМьВтЪЕбщ 34
4.3ЯрЕчСїМьВтЪЕбщ 35
4.4ЛєЖћаХКХМьВтЪЕбщ 35
4.5Ш§ЯрЗДЕчЖЏЪЦВЩМЏЪЕбщ 36
4.6БОеТаЁНс 36
ЕкЮхеТ змНсгыеЙЭћ 37
5.1змНс 37
5.2еЙЭћ 37
ВЮПМЮФЯз 39
жТаЛ 41
[РДдДЃКhttp://www.doc163.com]
ЩЯвЛЦЊЃКЙЄГЬзАБИКИНгаоИДСПздЖЏМьВтЯЕЭГЕФПЊЗЂ(КЌSTEPШ§ЮЌНЈФЃЭМ,ГЬађДњТы)
ЯТвЛЦЊЃКНгДЅЭјИпбЙМьВтМАЛњГЕНгЕизАжУЩшМЦ(КЌCADНгЕизАжУзАХфЭМ,ЕчТЗЭМ)