
ЙЄГЬзАБИКИНгаоИДСПздЖЏМьВтЯЕЭГЕФПЊЗЂ(КЌSTEPШ§ЮЌНЈФЃЭМ,ГЬађДњТы)

1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.НіЙЉбЇЯАВЮПМжЎгУ.
Ум Лн БЃ АяжњжааФ
ЙЄГЬзАБИКИНгаоИДСПздЖЏМьВтЯЕЭГЕФПЊЗЂ(КЌSTEPШ§ЮЌНЈФЃЭМ,ГЬађДњТы)(ШЮЮёЪщ,ПЊЬтБЈИц,ЭтЮФЗвы,ТлЮФЫЕУїЪщ21000зж,STEPШ§ЮЌЭМ,ГЬађДњТы)
еЊвЊ
дкДѓаЭзАБИЕФЖЈЦкМьаоЙ§ГЬжаЃЌЕБзАБИЕФЛњЬхЁЂжїжЇГХМўЕШГпДчНЯДѓЛђепВПМўВЛФмВ№аЖЕФН№ЪєМўЗЂЩњЫ№ЛЕЛђепЙЪеЯЪБЃЌгЩгкЦфГпДчНЯДѓКЭВЛБувЦЖЏЕФЬиЕуЃЌжЛФмдкЯжГЁНјааНєМБадЮЌаоЃЌжївЊЕФЮЌаоЪжЖЮЪЧЭЈЙ§КИНгЛђепЖбКИРДЪЕЯжЁЃ
БОЮФВЩгУЛњЦїЪгОѕЕФМьВтЗНЗЈЃЌЩшМЦСЫвЛжжЙЄГЬзАБИаоИДСПМьВтЯЕЭГЁЃЛљгкЛњЦїЪгОѕЕФМьВтзАжУЮЊаоИДЙЄзїЬсЙЉЙЄвеВЮЪ§ЕФЗНЗЈвбОГЩЮЊЯжНёжїСїаоИДЗНЗЈЃЌОпгаИпОЋЖШЁЂИпаЇТЪЕФЬиЕуЃЌСщЛюадЧПЃЌЪЪгУгкБОЩшМЦЖдЙЄГЬзАБИаоИДСПЕФМьВтЙЄзїЁЃБОЯЕЭГВЩгУЯпМЄЙтШ§ЮЌВтСПММЪѕЃЌНсКЯШ§НЧЦЪЗжКЭЧїЪЦЕуЬсШЁЕФЗНЗЈЖдаоИДСПНјааВЮЪ§ЬсШЁКЭШ§ЮЌжиЙЙЃЌПЩЮЊЙЄГЬзАБИаоИДСПМьВтЬсЙЉвЛжжПЩааадЗНАИЁЃ
БОТлЮФЕФжївЊЙЄзїАќРЈЃК
ЃЈ1ЃЉЭъГЩСЫеыЖдЙЄГЬзАБИаоИДСПМьВтЯЕЭГзмЬхЗНАИЩшМЦЃЌДгаоИДСПНсЙЙЬиЕуШыЪжЃЌЭъГЩМьВтЗНАИећЬхСїГЬЩшМЦЃЌДгЯЕЭГБъЖЈЁЂЭМЯёМьВтКЭЪ§ОнДІРэЕШЗНУцПЊеЙЙЄзїЃЌжївЊАќРЈЙЄГЬзАБИаоИДСПМьВтЯЕЭГЕФећЬхНсЙЙЩшМЦЁЂЯЕЭГСїГЬЩшМЦЁЂЪЕбщЦНЬЈгВМўбЁаЭЁЂШэМўЩшМЦКЭНЈФЃЁЃ
ЃЈ2ЃЉЭъГЩСЫЙЄГЬзАБИаоИДСПМьВтЯЕЭГЕФБъЖЈКЭЭМЯёДІРэЙЄзїЃЌВЩгУЛљгкHalconШэМўЦНЬЈЩшМЦМьВтЯЕЭГБъЖЈГЬађКЭЭМЯёДІРэГЬађЃЌИљОнЩшМЦвЊЧѓЭъГЩЦЌЙтБъЖЈЁЂЯрЛњБъЖЈКЭдЫЖЏзЫЬЌБъЖЈГЬађЕФПЊЗЂЃЌеыЖдЯпМЄЙтЭМЯёЬиЕуЃЌЭъГЩЭМЯёТЫВЈКЭЙтЬѕжааФЬсШЁГЬађЕФПЊЗЂЁЃ [зЪСЯРДдДЃКwww.doc163.com]
ЃЈ3ЃЉЭъГЩСЫЙЄГЬзАБИаоИДСПБэУцШ§ЮЌжиЙЙКЭаоИДСПВЮЪ§ЕФЫуЗЈЩшМЦЃЌЩшМЦеыЖдЕудЦЪ§ОнЕФЧїЪЦзЊелЕуЬсШЁЫуЗЈЃЌВЂЛљгкVisual Studio 2017ЦНЬЈЭъГЩаоИДСПВЮЪ§ЬсШЁШэМўПЊЗЂЃЌИљОнЩшМЦвЊЧѓбЁдёDelaunayШ§НЧЦЪЗжЗЈзїЮЊШ§ЮЌжиЙЙЫуЗЈЃЌЛљгкHalconШэМўЭъГЩШ§ЮЌжиЙЙГЬађЕФПЊЗЂЁЃ
ЃЈ4ЃЉЭъГЩСЫЙЄГЬзАБИаоИДСПМьВтЯЕЭГЕФЪЕбщВПЗжЃЌЖдбЁЖЈаоИДСПФЃаЭШ§ЮЌМьВтЃЌВЩгУЛљгкHalconЩшМЦЕФЭМЯёДІРэШэМўЭъГЩЭМЯёДІРэКЭШ§ЮЌжиЙЙЃЌВЩгУЛљгкC++ВЮЪ§ЬсШЁШэМўЭъГЩВЮЪ§ЬсШЁЙЄзїЃЌЭЈЙ§ЖдБШдгаФЃаЭЃЌбщжЄСЫБОЮФМьВтЯЕЭГЕФгааЇадЁЃ
ЙиМќДЪЃКЙЄГЬзАБИЃЛЮЌаоБЃеЯЃЛЖбКИЃЛШ§ЮЌжиЙЙЃЛЯпМЄЙт
Abstract
During the regular maintenance of large-scale equipment, when the size of the equipment, the main support, etc., or the metal parts that cannot be disassembled are damaged or malfunction, due to their large size and inconvenient movement, emergency can only be carried out on site. For maintenance, the main maintenance method is achieved by welding or surfacing.
In this paper, a machine vision detection method is designed to design a repairing system for engineering equipment. The machine vision-based detection device provides the process parameters for the repair work. It has become the mainstream repair method today. It has the characteristics of high precision and high efficiency, and has strong flexibility. It is suitable for the detection of engineering equipment repair volume. The system adopts the line laser three-dimensional measurement technology, combined with the triangulation and trend point extraction method to extract the parameters and three-dimensional reconstruction of the repair quantity, which can provide a feasible solution for the engineering equipment repair quantity detection.
[зЪСЯРДдДЃКhttp://Doc163.com]
The main work of this thesis includes:
(1) Completed the overall scheme design for the engineering equipment repair quantity detection system, starting from the repair quantity structure characteristics, completing the overall process design of the test plan, and carrying out work from system calibration, image detection and data processing, including the repair of engineering equipment. The overall structural design of the inspection system, system flow design, experimental platform hardware selection, software design and modeling.
(2) Completed the calibration and image processing of the engineering equipment repair quantity detection system, and adopted the Halcon software platform to design the detection system calibration program and image processing program, and completed the development of the film cursor setting, camera calibration and motion attitude calibration program according to the design requirements. For the characteristics of line laser images, the development of image filtering and strip center extraction procedures is completed.
[зЪСЯРДдДЃКhttp://www.doc163.com]
(3) The algorithm design of 3D reconstruction and repair parameters of engineering equipment repair surface is completed, the trend turning point extraction algorithm for point cloud data is designed, and the repair parameter extraction software development is completed based on Visual Studio 2017 platform, according to design requirements. Delaunay triangulation is used as a 3D reconstruction algorithm to
develop 3D reconstruction programs based on Halcon software.
(4) The experimental part of the engineering equipment repair quantity detection system was completed. The 3D inspection of the selected repair quantity model was carried out. The image processing software and 3D reconstruction were completed by using the image processing software based on Halcon design. The parameter extraction work was completed based on C++ parameter extraction software. By comparing the original model, the effectiveness of the detection system in this paper is verified.
Keywords: engineering equipment; maintenance support; surfacing; 3D reconstruction; line laser
[зЪСЯРДдДЃКDoc163.com]
ПЮЬтбаОПЛљБОФкШн
БОЮФеыЖдЙЄГЬзАБИаоИДСПЩшМЦЛљгкЛњЦїЪгОѕЕФШ§ЮЌМьВтзАжУЃЌИУМьВтзАжУВЩгУЯпМЄЙтЩЈУшШ§ЮЌВтСПММЪѕЃЌЭЈЙ§ЖдЮяЬхБэУцЩЈУшЕУЕНД§аоИДВПЗжЕФШ§ЮЌЕудЦЪ§ОнЃЌВЂЖдЕудЦЪ§ОнМгЙЄДІРэЕУЕНШ§ЮЌжиЙЙФЃаЭКЭаоИДВЮЪ§ЁЃ
БОЮФНсЙЙШчЯТЃК
ЕквЛеТаїТлВПЗжВћЪіБОЩшМЦбаОПФПЕФвтвхКЭЙњФкЭтЯжзДЃЌДѓжТНщЩмСЫЛњЦїЪгОѕСьгђдкЛњЦїШЫгІгУЗНУцНќФъРДЕФЗЂеЙзДПіЁЃ
ЕкЖўеТЮЊаоИДСПМьВтЯЕЭГдРэЃЌжївЊЮЊШ§ЮЌМьВтЕФРэТлВПЗжЃЌАќРЈЯпМЄЙтМьВтЕФМЄЙтШ§НЧдРэЁЂШ§ЮЌжиЙЙЕФDelaunayШ§НЧЦЪЗжЗЈКЭВЮЪ§ЬсШЁЕФЧїЪЦзЊелЕуЬсШЁЗЈЁЃ
ЕкШ§еТЮЊаоИДСПМьВтЯЕЭГЦНЬЈДюНЈЃЌжївЊНщЩмСЫгВМўЦНЬЈКЭШэМўЦНЬЈЕФбЁаЭКЭВПЗжГЬађЩшМЦЁЃ
ЕкЫФеТЮЊМьВтЯЕЭГЕФБъЖЈЃЌжївЊНщЩмСЫЙЄвЕЯрЛњБъЖЈКЭЯЕЭГБъЖЈдРэвдМАБъЖЈЙ§ГЬКЭНсЙћЁЃ
ЕкЮхеТЮЊМьВтзАжУЕФЪЕбщЃЌжївЊНщЩмСЫЭМЯёВЩМЏЁЂЭМЯёДІРэЁЂШ§ЮЌжиЙЙКЭВЮЪ§ЬсШЁЫФИіВПЗжЕФЪЕбщЙ§ГЬЁЃ
ЕкСљеТЮЊеЙЭћКЭзмНсЁЃ
ЙЄГЬзАБИаоИДСПМьВтЯЕЭГдРэ
БОЩшМЦВЩгУЯпМЄЙтЩЈУшШ§ЮЌВтСПММЪѕЃЌЯпМЄЙтЩЈУшШ§ЮЌВтСПММЪѕЪЧНќЖўЪЎФъРДЙњФкЭтЗЂеЙНЯЮЊГЩЪьЕФЗЧНгДЅВтСПММЪѕ[22]ЁЃИУММЪѕВЛНіОпгаИпОЋЖШЁЂЯЕЭГНсЙЙМђЕЅЁЂгІгУЗЖЮЇЙуЗКЃЌВЛОжЯогкИеадЮяЬхЕФгХЕуЃЌЖјЧвФмЭЈЙ§РЉеЙзАжУЃЌгУгкДѓаЭСуМўЕФМьВтЗНАИЃЌТњзуБОЩшМЦЖдЙЄГЬзАБИД§аоИДВПЗжЕФМьВтЁЃ [зЪСЯРДдДЃКhttp://doc163.com]
2.1ЙЄГЬзАБИаоИДСПМьВтЩЈУшЯЕЭГзщГЩ
ЯпМЄЙтЩЈУшЕФКЫаФдРэЪЧШ§НЧВтСПММЪѕЃЌгЩКЩРМШЫЫЙФљЖћдк1617ФъЪзДДЃЌгыМЄЙтЙтбЇСьгђНсКЯаЮГЩвЛжжИпОЋЖШШ§ЮЌВтСПЗНЗЈ[23]ЁЃЛљгкМЄЙтШ§НЧВтСПдРэЕФЯпМЄЙтЩЈУшШ§ЮЌВтСПЯЕЭГжївЊгЩЯпМЄЙтЗЂЩфЦїКЭЙЄвЕЯрЛњзщГЩЃЌШчЭМ2.1ЫљЪОЃЌЯпМЄЙтЗЂЩфЦїКЭЙЄвЕЯрЛњЙЬЖЈдкМьВтЦНЬЈЃЌСНепжЎМфОпгавЛЖЈНЧЖШЃЌД§ВтЮяЬхЙЬЖЈдкНјИјЯЕЭГЩЯВЂбивЛЖЈЗНЯђвЦЖЏЃЌВЩгУЯпМЄЙтЗЂЩфЦїзїЮЊЯЕЭГЙтдДЃЌЯпМЄЙтдкЮяЬхБэУцаЮГЩвЛЬѕНЯЮЊУїЯдЕФЙтЬѕЃЌЮяЬхБэУцВњЩњЗДЩфЯжЯѓЃЌЙтзюжеДяЕНЙЄвЕЯрЛњЕФИаЙтОиеѓЩЯЁЃ
[РДдДЃКhttp://Doc163.com]



 [РДдДЃКhttp://Doc163.com]
[РДдДЃКhttp://Doc163.com] 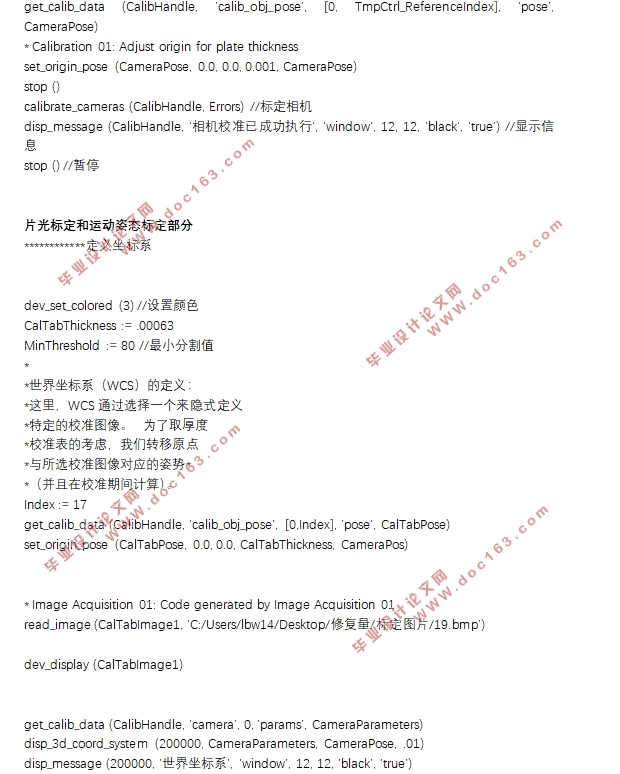
ФП ТМ
ЕквЛеТаїТл 1
1.1баОПБГОАМАвтвх 1
1.2ЙњФкЭтКИНгЛњЦїШЫЛњЦїЪгОѕМьВтММЪѕбаОПЯжзД 2
1.2.1ЙњФкЯжзД 2
1.2.2ЙњЭтЯжзД 2 [зЪСЯРДдДЃКhttp://www.doc163.com]
1.3ЙЄГЬзАБИаоИДСПНсЙЙЬиЕугыФЃаЭДюНЈ 3
1.4ПЮЬтбаОПЛљБОФкШн 5
ЕкЖўеТЙЄГЬзАБИаоИДСПМьВтЯЕЭГдРэ 7
2.1ЙЄГЬзАБИаоИДСПМьВтЩЈУшЯЕЭГзщГЩ 7
2.2МЄЙтШ§НЧдРэ 8
2.3МЄЙтШ§НЧЗЈЖдБШбЁдё 8
2.4аоИДСПШ§ЮЌжиЙЙдРэ 10
2.5аоИДСПВЮЪ§ЬсШЁЫуЗЈ 11
ЕкШ§еТЙЄГЬзАБИаоИДСПМьВтЯЕЭГЦНЬЈДюНЈ 14
3.1ЙЄГЬзАБИаоИДСПМьВтЯЕЭГзмЬхЗНАИЩшМЦ 14
3.2ЙЄГЬзАБИаоИДСПМьВтЯЕЭГећЬхНсЙЙЩшМЦ 15
3.3ЙЄГЬзАБИаоИДСПгВМўЦНЬЈЩшМЦМАбЁаЭ 16
3.3.1ЙЄвЕЯрЛњ 16
3.3.2ЯпМЄЙтЦї 17
3.3.3НјИјЯЕЭГ 18
3.4ЙЄГЬзАБИаоИДСПМьВтзАжУНЈФЃ 18
3.5ЙЄГЬзАБИаоИДСПШэМўЩшМЦМАбЁаЭ 20
3.5.1HalconШэМў 20
3.5.2ЛљгкHalconЭМЯёДІРэГЬађЩшМЦ 20
[зЪСЯРДдДЃКwww.doc163.com]
3.5.3 Visual Studio 2017 21
3.5.4ЛљгкC++ГЬађаоИДСПВЮЪ§ЬсШЁШэМўЩшМЦ 21
ЕкЫФеТЙЄГЬзАБИаоИДСПМьВтЯЕЭГБъЖЈ 24
4.1ЙЄвЕЯрЛњБъЖЈ 24
4.1.1ЯрЛњИїЭМЯёзјБъЯЕ 24
4.1.2ЯрЛњеыПзГЩЯёдРэ 24
4.1.3ЯрЛњИїЦНУцМИКЮЙиЯЕ 26
4.2ЯЕЭГБъЖЈ 29
4.2.1ЦЌЙтБъЖЈ 29
4.2.2дЫЖЏзЫЬЌБъЖЈ 30
4.3ЛљгкHalconМьВтЯЕЭГБъЖЈЙ§ГЬМАНсЙћ 30
4.3.1ЛљгкHalconЙЄвЕЯрЛњБъЖЈЙ§ГЬ 30
4.3.2ЛљгкHalconЙЄвЕЯрЛњБъЖЈНсЙћ 31
4.3.3ЛљгкHalconЦЌЙтБъЖЈКЭдЫЖЏзЫЬЌБъЖЈЙ§ГЬМАНсЙћ 32
ЕкЮхеТЙЄГЬзАБИаоИДСПМьВтЯЕЭГЪЕбщ 35
5.1ЙЄГЬзАБИаоИДСПМьВтЯЕЭГЩЈУшЙ§ГЬ 35
5.2ЯпМЄЙтЭМЯёДІРэ 35
5.2.2ЯпМЄЙтЭМЯёТЫВЈ 36
5.2.3ЯпМЄЙтЙтЬѕжааФЬсШЁ 37
[РДдДЃКhttp://www.doc163.com]
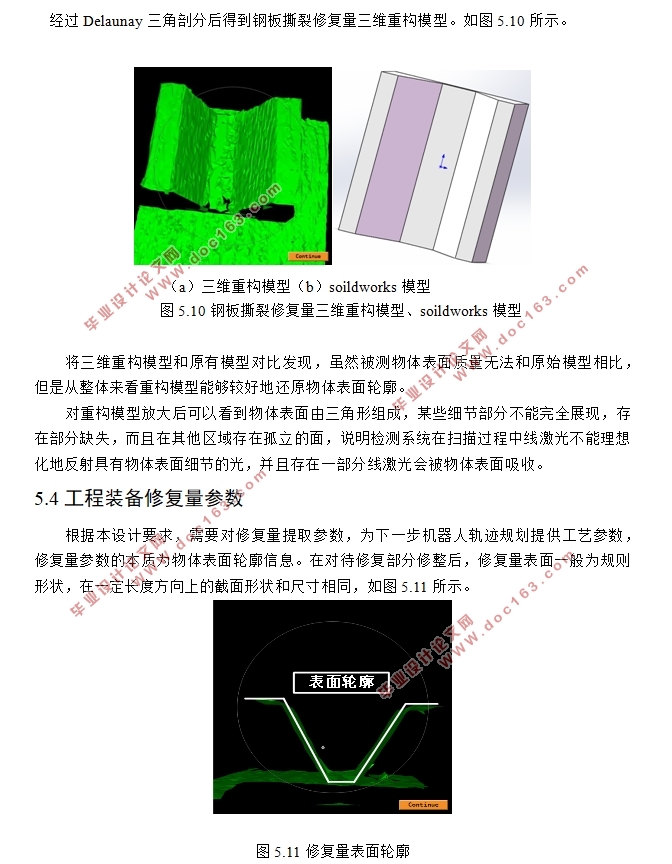
5.3ЙЄГЬзАБИаоИДСПШ§ЮЌжиЙЙ 40
5.4ЙЄГЬзАБИаоИДСПВЮЪ§ 41
ЕкСљеТзмНсКЭеЙЭћ 44
баОПГЩЙћ 45
ВЮПМЮФЯз 46
жТаЛ 48
[зЪСЯРДдДЃКhttp://www.doc163.com]
ЩЯвЛЦЊЃКШ§зјБъЪ§ПиЯГДВЩшМЦ(КЌCADЭМ)
ЯТвЛЦЊЃКЫФзуЛњЦїШЫЕЅЭШНсЙЙЩшМЦМАЦфЛљДЁЕчЛњПижЦЯЕЭГбаОП(КЌCADЭМ,SolidWorksШ§ЮЌ