
ЫФздгЩЖШЕФЙЄвЕЛњЦїШЫЛњаЕЪжЕФЩшМЦ(КЌCADСуМўЭМзАХфЭМ)

1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.НіЙЉбЇЯАВЮПМжЎгУ.
Ум Лн БЃ АяжњжааФ
ЫФздгЩЖШЕФЙЄвЕЛњЦїШЫЛњаЕЪжЕФЩшМЦ(КЌCADСуМўЭМзАХфЭМ)(ТлЮФЫЕУїЪщ13800зж,CADЭМжН9еХ)
еЊ вЊ
дкЕБНёДѓЙцФЃжЦдьвЕжаЃЌЦѓвЕЮЊЬсИпЩњВњаЇТЪЃЌБЃеЯВњЦЗжЪСПЃЌЦеБщжиЪгЩњВњЙ§ГЬЕФздЖЏЛЏГЬЖШЃЌЙЄвЕЛњЦїШЫзїЮЊздЖЏЛЏЩњВњЯпЩЯЕФживЊГЩдБЃЌж№НЅБЛЦѓвЕЫљШЯЭЌВЂВЩгУЁЃЙЄвЕЛњЦїШЫЕФММЪѕЫЎЦНКЭгІгУГЬЖШдквЛЖЈГЬЖШЩЯЗДгГСЫвЛИіЙњМвЙЄвЕздЖЏЛЏЕФЫЎЦНЃЌФПЧАЃЌЙЄвЕЛњЦїШЫжївЊГаЕЃзХКИНгЁЂХчЭПЁЂАсдЫвдМАЖбЖтЕШжиИДадВЂЧвРЭЖЏЧПЖШМЋДѓЕФЙЄзїЃЌЙЄзїЗНЪНвЛАуВЩШЁЪОНЬдйЯжЕФЗНЪНЁЃ
БОЮФНЋЩшМЦвЛЬЈЫФздгЩЖШЕФЙЄвЕЛњЦїШЫЃЌгУгкИјГхбЙЩшБИдЫЫЭЮяСЯЁЃЪзЯШЃЌБОЮФНЋЩшМЦЛњЦїШЫЕФЕззљЁЂДѓБлЁЂаЁБлКЭЛњаЕЪжЕФНсЙЙЃЌШЛКѓбЁдёКЯЪЪЕФДЋЖЏЗНЪНЁЂЧ§ЖЏЗНЪНЃЌДюНЈЛњЦїШЫЕФНсЙЙЦНЬЈЃЛдкДЫЛљДЁЩЯЃЌБОЮФНЋЩшМЦИУЛњЦїШЫЕФПижЦЯЕЭГЃЌАќРЈЪ§ОнВЩМЏПЈКЭЫХЗўЗХДѓЦїЕФбЁдёЁЂЗДРЁЗНЪНКЭЗДРЁдЊМўЕФбЁдёЁЂЖЫзгАхЕчТЗЕФЩшМЦвдМАПижЦШэМўЕФЩшМЦЃЌжиЕуМгЧППижЦШэМўЕФПЩППадКЭЛњЦїШЫдЫааЙ§ГЬЕФАВШЋадЃЌзюжеЪЕЯжЕФФПБъАќРЈЃКЙиНкЕФЫХЗўПижЦКЭжЦЖЏЮЪЬтЁЂЪЕЪБМрВтЛњЦїШЫЕФИїИіЙиНкЕФдЫЖЏЧщПіЁЂЛњЦїШЫЕФЪОНЬБрГЬКЭдкЯпаоИФГЬађЁЂЩшжУВЮПМЕуКЭЛиВЮПМЕуЁЃ
ЙиМќДЪЃКЛњЦїШЫЃЌЪОНЬБрГЬЃЌЫХЗўЃЌжЦЖЏ
ABSTRACT [зЪСЯРДдДЃКDoc163.com]
In the modern large-scale manufacturing industry, enterprises pay more attention on the automation degree of the production process in order to enhance the production efficiency, and guarantee the product quality. As an important part of the automation production line, industrial robots are gradually approved and adopted by enterprises. The technique level and the application degree of industrial robots reflect the national level of the industrial automation to some extent, currently, industrial robots mainly undertake the jops of welding, spraying, transporting and stowing etc. , which are usually done repeatedly and take high work strength, and most of these robots work in playback way.
In this paper I will design an industrial robot with four DOFs, which is used to carry material for a punch. First I will design the structure of the base, the big arm, the small arm and the end manipulator of the robot, then choose proper drive method and transmission method, building the mechanical structure of the robot. On this foundation, I will design the control system of the robot, including choosing DAQ card, servo control, feedback method and designing electric circuit of the terminal card and control software. Great attention will be paid on the reliability of the control software and the robot safety during running. The aims to realize finally include: servocontrol and brake of the joint, monitoring the movement of each joint in realtime, playback programming and modifying the program online, setting reference point and returning to reference point.
KEY WORDS: robot, playback, servocontrol, brake
[зЪСЯРДдДЃКhttp://Doc163.com]

ФП ТМ
Ек1еТ аїТл…………………………………………………………………… 3 [зЪСЯРДдДЃКhttps://www.doc163.com]
1.1 ЛњЦїШЫИХЪі…………………………………………………………… 4
1.2 ЛњЦїШЫЕФРњЪЗЁЂЯжзД………………………………………………… 4
1.3 ЛњЦїШЫЕФЗЂеЙЧїЪЦ…………………………………………………… 4
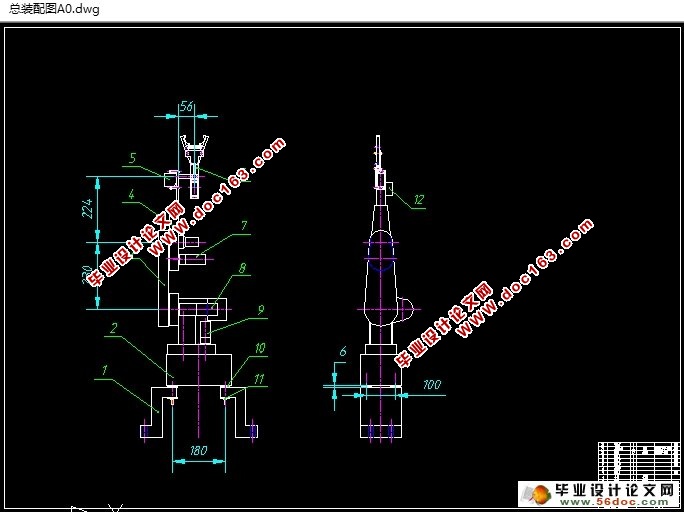
Ек2еТ ЛњЦїШЫЪЕбщЦНЬЈНщЩмМАЛњаЕЪжЕФЩшМЦ……………3
2.1здгЩЖШМАЙиНк…………………………………………………………… 4
2.2 ЛљзљМАСЌИЫ…………………………………………………………… 4
[зЪСЯРДдДЃКhttp://www.doc163.com]
2.2.1 Лљзљ……………………………………………………………… 7
2.2.2 ДѓБл……………………………………………………………… 7
2.2.3 аЁБл……………………………………………………………… 7
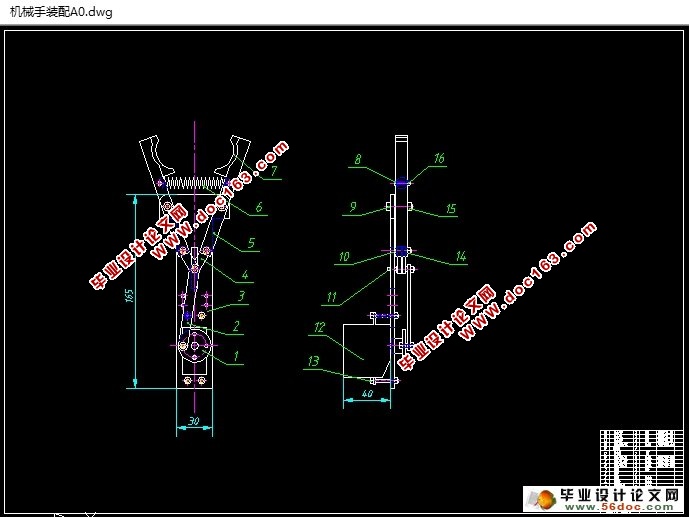
2.3 ЛњаЕЪжЕФЩшМЦ……………………………………………………………4
2.4 Ч§ЖЏЗНЪН…………………………………………………………………4 [зЪСЯРДдДЃКDoc163.com]
2.5 ДЋЖЏЗНЪН…………………………………………………………………4
2.6 жЦЖЏЦї……………………………………………………………………4
Ек3еТ ПижЦЯЕЭГгВМў……………………………………………………………4
3.1 ПижЦЯЕЭГФЃЪНЕФбЁдё……………………………………………………4
3.2 ПижЦЯЕЭГЕФДюНЈ……………………………………………………… 4
3.2.1 ЙЄПиЛњ……………………………………………………………4
3.2.2 Ъ§ОнВЩМЏПЈ………………………………………………………4
3.2.3 ЫХЗўЗХДѓЦї………………………………………………………4
3.2.4 ЖЫзгАх…………………………………………………………… 4
3.2.5ЕчЮЛЦїМАЦфБъЖЈ………………………………………………… 4
3.2.6ЕчдД……………………………………………………………… 4 [РДдДЃКhttp://www.doc163.com]
Ек4еТ ПижЦЯЕЭГШэМў………………………………………………………… 4
4.1дЄЦкЕФЙІФм…………………………………………………………… 4
4.2 ЪЕЯжЗНЗЈ………………………………………………………………4
4.2.1ЪЕЪБЯдЪОИїИіЙиНкНЧМАдЫЖЏЗЖЮЇПижЦ ………………………4
4.2.2жБСїЕчЛњЕФЫХЗўПижЦ………………………………………………4
4.2.3ЕчЛњЕФздЫј…………………………………………………………4 [зЪСЯРДдДЃКhttps://www.doc163.com]
4.2.4ЪОНЬБрГЬМАдкЯпаоИФГЬађ…………………………………………4
4.2.5ЩшжУВЮПМЕуМАЛиВЮПМЕу……………………………………………4
Ек5еТ змНс……………………………………………………………………… 4
5.1 ЫљЭъГЩЕФЙЄзї………………………………………………………… 4
5.2 ЩшМЦОбщ……………………………………………………………… 4
5.3 ЮѓВюЗжЮі……………………………………………………………… 4
[зЪСЯРДдДЃКhttps://www.doc163.com]
5.4 ПЩвдМЬајЬНЫїЕФЗНЯђ………………………………………………… 4
жТ аЛ……………………………………………………………………………… 4
ВЮПМЮФЯз………………………………………………………………………… 4
[РДдДЃКhttp://www.doc163.com]
ЩЯвЛЦЊЃКЯяЕРЖбЖтРрздЖЏЛЏСЂЬхГЕПтЩшМЦ(КЌCADЭМ)
ЯТвЛЦЊЃКCK6163знЯђНјИјЯЕЭГЩшМЦ(КЌCADЭМ,CAXAЭМ,гВМўЕчТЗЩшМЦ)