
АсдЫЛњаЕЪжЛњЙЙЩшМЦгыПижЦЕчТЗЩшМЦ(КЌCADСуМўЭМзАХфЭМ,ЕчЦјЭМ)

1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.НіЙЉбЇЯАВЮПМжЎгУ.
Ум Лн БЃ АяжњжааФ
АсдЫЛњаЕЪжЛњЙЙЩшМЦгыПижЦЕчТЗЩшМЦ(КЌCADСуМўЭМзАХфЭМ,ЕчЦјЭМ)(ШЮЮёЪщ,ПЊЬтБЈИц,БЯвЕТлЮФ22500зж,CADЭМжН13еХ,Д№БчPPT)
еЊвЊ
ЛњаЕЪжЪЧвЛжжФмздЖЏПижЦВЂПЩДгаТБрГЬвдБфЖЏЕФЖрЙІФмЛњЦїЃЌЫћгаЖрИіздгЩЖШЃЌПЩвдАсдЫЮяЬхвдЭъГЩдкВЛЭЌЛЗОГжаЕФЙЄзїЁЃЛњаЕЪжФмФЃЗТШЫЪжКЭБлЕФФГаЉЖЏзїЙІФмЃЌгУгкАДЙЬЖЈГЬађзЅШЁЁЂАсдЫЮяЬхЛђВйзїЙЄОпЕФздЖЏВйзїзАжУЁЃЫќПЩвдДњЬцШЫЕФЗБжиРЭЖЏвдЪЕЯжЩњВњздЖЏЛЏКЭЛњаЕЛЏЃЌФмдкгаКІЛЗОГЯТВйзївдБЃжЄШЫЕФАВШЋЃЌвђЖјЙуЗКгІгУгкЛњаЕжЦдьЁЂвБН№ЁЂЕчзгЁЂЧсЙЄКЭдзгФмЕШВПУХЁЃдкЙЄвЕВПУХжагІгУЕФЛњаЕЪжГЦЮЊЙЄвЕЛњаЕЪжЁЃ
ЙЄвЕЛњаЕЪжЪЧНќДњздЖЏПижЦСьгђжаГіЯжЕФвЛЯюаТММЪѕЃЌЪЧНќМИЪЎФъЗЂеЙЦ№РДЕФвЛжжИпПЦММздЖЏЩњВњЩшБИЁЃЩцМАЕНСІбЇЁЂЛњаЕбЇЁЂЕчЦївКбЙММЪѕЁЂздЖЏПижЦММЪѕЁЂДЋИаЦїММЪѕКЭМЦЫуЛњММЪѕЕШПЦбЇСьгђЃЌЪЧвЛУХПчбЇПЦзлКЯММЪѕЁЃЫќЕФЬиЕуЪЧПЩвдЭЈЙ§БрГЬРДЭъГЩИїжждЄЦкЕФзївЕЃЌдкЙЙдьКЭадФмЩЯМцгаШЫКЭЛњЦїИїздЕФгХЕуЃЌгШЦфЬхЯждкШЫЕФжЧФмКЭЪЪгІадЁЃЛњаЕЪжзївЕЕФзМШЗадКЭЛЗОГжаЭъГЩзївЕЕФФмСІЃЌдкЙњУёОМУСьгђгазХЙуЗКЕФЗЂеЙПеМфЁЃ
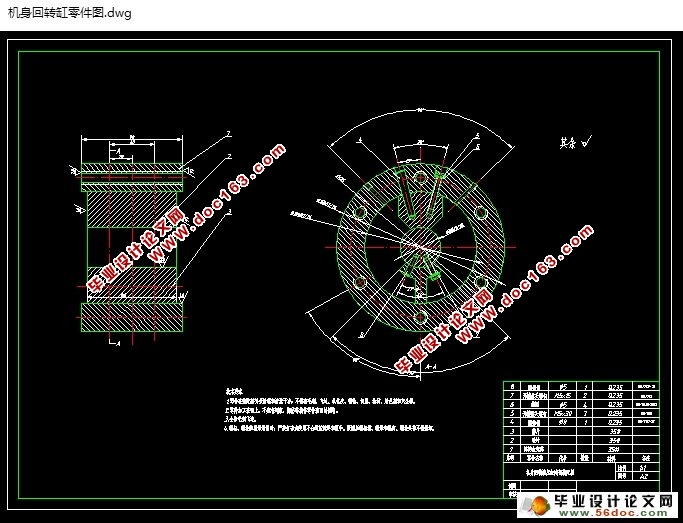
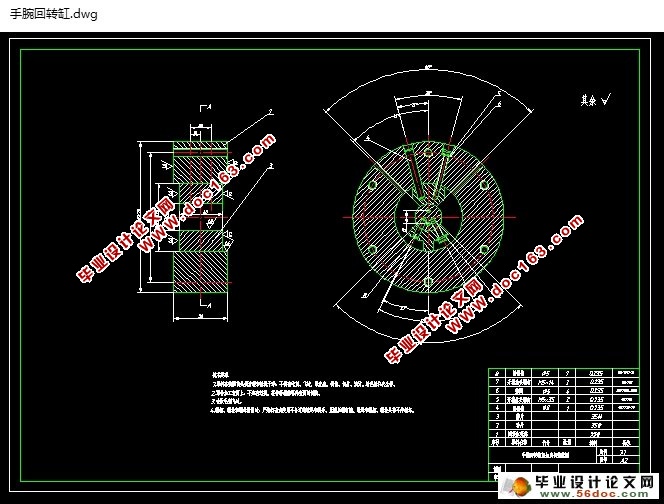
ЩшМЦАќКЌСЫЛњаЕЪжЕФНсЙЙЩшМЦМАПижЦЕчТЗЩшМЦЃЌЦфжадкНсЙЙЩшМЦетЗНУцАќКЌСЫЛњаЕЪжЕФЪжВПНсЙЙЁЂЭѓВПНсЙЙЁЂБлВПНсЙЙЩшМЦМАЛњЩэЕФећЬхНсЙЙЩшМЦЁЃдкПижЦЕчТЗЩшМЦетЗНУцАќКЌСЫвКбЙЧ§ЖЏПижЦЩшМЦЁЂЦїМўЕФбЁдёЩшМЦЁЂPLCПЩБрГЬздЖЏПижЦЕчТЗЩшМЦЁЃБОБЯвЕЩшМЦЁЖАсдЫЛњаЕЪжЛњЙЙгыПижЦЕчТЗЩшМЦЁЗЗЧГЃЪЪКЯзїЮЊЛњаЕЕчзгЙЄГЬетУХзЈвЕДѓбЇЫФФъЕФвЛИізмНсЁЃвђЮЊЦфжаАќКЌСЫЛњаЕЩшМЦгыЕчТЗЩшМЦЃЌЪЧЛњаЕгыЕчзгЕФНсКЯЬхЃЌФмГфЗжЬхЯжетУХзЈвЕЕФФкКЁЃ [зЪСЯРДдДЃКhttp://www.doc163.com]
ЙиМќДЪЃКЛњаЕЪжЃЛЪжВПЃЛЭѓВПЃЛБлВПЃЛЛњЩэЃЛвКбЙЃЛЕчТЗ
Design of Manipulator Mechanism and Control Circuit
ABSTRACT
Manipulator is a kind of automatic control and from the new process to change the multi-function machine, he has multiple degrees of freedom, can carry objects to complete the work in different environments. Mechanical hand can imitate hand and arm function for some action, according to a fixed program to crawl, moving objects or to operate the automatic tool operation device. It can replace people arduous labor to realize production automation and mechanization, can operate under the hostile environment to guarantee the security of the person, and so it is widely used in machinery manufacturing, metallurgy, electron, light industry and atomic energy industries. In the industrial sector in the application of the mechanical hand is called the industrial manipulator.
Industrial machinery hand is the modern automatic control in the field of a new technology developed in recent years, is a high-tech automated production equipment. Involves mechanics, mechanical, electrical and hydraulic technology, the automatic control technology, sensor technology and computer technology and other fields of science, is an interdisciplinary comprehensive technology. It is characterized by a variety of programming to complete the expected operation, in the structure and performance of both people and machines to their respective advantages, especially in human intelligence and adaptability. Mechanical hand operating accuracy and environment to complete operations capability, in the national economy has a broad development space.
[зЪСЯРДдДЃКhttp://doc163.com]
This design includes the structure of the manipulator design and the control circuit, wherein the structure design that incorporates a mechanical hand, wrist, arm structure structure structure design and the overall structure of the design. Early control circuit design which contains a hydraulic drive control design, choice of sensors design, PLC programmable automatic control circuit design. This graduation design" handling manipulator mechanism and control circuit design" is suitable for the mechanical electronic engineering this specialized university four years in a summary. Because of which includes the mechanical design and circuit design, mechanical and electronic integration, can fully reflect the professional connotation.
Key words: mechanical hand; hand; wrist; arm; the fuselage; hydraulic circuit
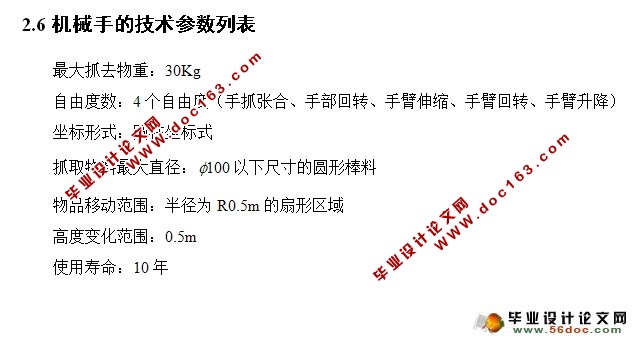
ЛњаЕЪжЕФЛњаЕНсЙЙжївЊЪжзЅЁЂЪжЭѓЁЂЪжБлЁЂКЭЛњЩэзщГЩЃЌАќРЈгЩСНИівКбЙЛизЊИзКЭШ§ИівКбЙЩьЫѕИзЃЌВЩгУвКбЙЧ§ЖЏЗНАИПижЦЛњаЕЪждЫЖЏЃЌгУЕчДХЗЇПижЦЕФвКбЙИзРДЪЕЯжЛњаЕЪжЕФЩЯЩ§ЁЂЯТНЕЁЂЩьЫѕЁЂЗзЊдЫЖЏМАМаНєЙЄМўЕФЖЏзїЃЌВЩгУПЩБрГЬађПижЦЦїЖдЛњаЕЪжЪЕЯжздЖЏПижЦЁЃИУЩшМЦНЋЪЕЯжЖджБОЖ вдЯТГпДчЁЂжиИпДя30kgЕФдВаЮАєСЯдквЦЖЏЗЖЮЇАыОЖЮЊ0.5mЕФЩШаЮЧјгђЃЌИпЖШБфЛЏЗЖЮЇЮЊЃК0.5mЕФЧјгђФкНјааПЩБрГЬПижЦАсдЫЁЃ [зЪСЯРДдДЃКwww.doc163.com]
[зЪСЯРДдДЃКhttp://doc163.com]

[зЪСЯРДдДЃКhttps://www.doc163.com]
ФПТМ
ЕквЛеТ аїТл 1
1.1ЛњаЕЪжЕФбаОПИХПі 1
1.2ЛњаЕЪжЗЂеЙЗНЯђ 1
1.3ЙЄвЕЛњаЕЪждкЩњВњжаЕФгІгУ 2
1.4БОЩшМЦжабаОПЕФжївЊФкШн 3
ЕкЖўеТ АсдЫЛњаЕЪжЕФзмЬхЩшМЦЗНАИ 4
2.1ЛњаЕЪжЕФзщГЩ 4
2.2ЛњаЕЪжЛљБОНсЙЙЕФбЁдё 4
2.3ЛњаЕЪжЕФжДааЛњЙЙ 4
2.4ЛњаЕЪжЕФЧ§ЖЏЛњЙЙ 4
2.5ЛњаЕЪжЕФПижЦЗНЪНбЁдё 5
2.6ЛњаЕЪжЕФММЪѕВЮЪ§СаБэ 5
ЕкШ§еТ АсдЫЛњаЕЪжЪжБлИїВПМўЕФЩшМЦ 6
3.1ЛњаЕЪжЪжВПЕФЩшМЦМЦЫу 6
3.1.1ЪжВПЩшМЦЛљБОвЊЧѓ 6
3.1.2 ЪжВПЛњЙЙЕФбЁдё 6
3.1.3ЪжзЅЕФЩшМЦМЦЫу 6
3.2ЭѓВПЕФЩшМЦМЦЫу 17
3.2.1ЭѓВПЩшМЦЛљБОвЊЧѓ 17
3.2.2 ЭѓВПЛњЙЙЕФбЁдё 17
3.2.3ЭѓВПЕФЩшМЦМЦЫу 18
3.3БлВПЕФЩшМЦМЦЫу 24
3.3.1БлВПЩшМЦЛљБОвЊЧѓ 24
3.3.2 БлВПЛњЙЙЗНАИЕФбЁдё 25
3.3.3БлВПЕФЩшМЦМЦЫу 27
ЕкЫФеТ ЛњЩэЕФЩшМЦМЦЫу 40
4.1ЛњЩэЕФзмЬхЩшМЦ 40
4.2ЛњЩэЕФЩ§НЕЛњЙЙЩшМЦМЦЫу 41
4.2.1ЪжБлЦЋжиСІОиЕФМЦЫу 41
4.2.2Щ§НЕЕМЯђСЂжљВЛздЫјЬѕМўЗжЮіМЦЫу 42
4.2.3ЛњЩэЩ§НЕвКбЙИзЧ§ЖЏСІОиЕФМЦЫу 43
4.2.4ЪжБлЩ§НЕвКбЙИзВЮЪ§МЦЫу 44
4.3ЛњЩэЕФЛизЊЛњЙЙЩшМЦМЦЫу 49
4.3.1ЛњЩэЛизЊвКбЙИзЧ§ЖЏСІОиМЦЫу 49
4.3.2ЛњЩэЛизЊвКбЙИзжївЊВЮЪ§ 51
4.3.4ЛњЩэЛизЊвКбЙИзТнЖЄЕФМЦЫу 52
4.3.5ЖЏЦЌгыЪфГіжсМфЕФСЌНгТнЖЄМЦЫу 53
4.3.6ЛњЩэЛизЊвКбЙИзЭВЕФБкКёаЃКЫ 54
4.4СЊНгАхЕФЩшМЦ 55
4.4.1СЊНгАхЕФНщЩмМАзїгУ 55 [РДдДЃКhttp://www.doc163.com]
ЕкЮхеТ вКбЙЧ§ЖЏЯЕЭГгыПижЦЕчТЗЕФЩшМЦ 57
5.1Ч§ЖЏЯЕЭГЩшМЦвЊЧѓ 57
5.2Ч§ЖЏЯЕЭГЩшМЦЗНАИ 57
5.3Ч§ЖЏЯЕЭГЩшМЦ 58
5.3.1ЗжЙІФмЩшМЦЗжЮі 58
5.3.2вКбЙБУЕФШЗЖЈгыЫљашЙІТЪМЦЫу 59
5.4ПижЦЕчТЗЩшМЦ 66
ВЮПМЮФЯз 67
жТаЛ 68
ИНТМA 69
ИНТМA
1 АсдЫЛњаЕЪжЛњЙЙзАХфЭМ A0 ЭМ1
2 ЛњЩэЛизЊИзФкВПзАХфЭМ A2 ЭМ2
3 ЪжЭѓЛизЊИзФкВПзАХфЭМ A2 ЭМ3
4 ЛЈМќЬз A4 ЭМ4
5 ЛЈМќжс A4 ЭМ5
6 ЪжзЅЧ§ЖЏвКбЙИз A2 ЭМ6
[зЪСЯРДдДЃКhttps://www.doc163.com]
7 ЪжЭѓЛизЊИзЖЫИЧ A3 ЭМ7
8 Щ§НЕИзЛюШћИЫ A2 ЭМ8
9 ЩЯСЌНгАх A3 ЭМ9
10 ЯТСЌНгАх A2 ЭМ10
11 ЛњЩэЕззљ A2 ЭМ11
[зЪСЯРДдДЃКhttp://doc163.com]
ЩЯвЛЦЊЃКЪ§ПиГЕДВздЖЏЛизЊЕЖМмЩшМЦ(CADСуМўзАХфЭМ,ЕчЦјдРэЭМ)
ЯТвЛЦЊЃКЩйГнВюаааЧМѕЫйЦїЩшМЦ(КЌCADСуМўЭМзАХфЭМ)