
АсдЫЪНЛњаЕЪжПЮГЬЩшМЦ(CAD,CAXA,СуМўЭМ,зАХфЭМ,ЕчЦјЭМ)

1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.НіЙЉбЇЯАВЮПМжЎгУ.
Ум Лн БЃ АяжњжааФ
АсдЫЪНЛњаЕЪжПЮГЬЩшМЦ(CAD,CAXA,СуМўЭМ,зАХфЭМ,ЕчЦјЭМ)(ЩшМЦЫЕУїЪщ4800зж,CAD7еХ,CAXAЭМ7еХ,ЕчЦјЭМ,СуМўЭМ,зАХфЭМ)
ЬтФПЃК АсдЫЛњаЕЪж
ММЪѕВЮЪ§ЃК1ЁЂзЅжи:19000g (МаГжЪНЪжВП)
2ЁЂздгЩЖШЪ§:2ИіздгЩЖШ
3ЁЂзјБъаЭЪН:жБНЧзјБъаЭ
4ЁЂКсБлЪжБлГЄЖШ:1000mm
5ЁЂЪжБлзюДѓИпЖШ:1500mm
вЊЧѓЃКНЋЙЄМўДгвЛИіЙЬЖЈЮЛжУвЦЖЏЕНСэЭтЙЬЖЈЮЛжУ
[зЪСЯРДдДЃКDoc163.com]

ФП ТМ [РДдДЃКhttp://Doc163.com]
Ек1еТ аїТл………………………………………………………………………………1
1.1 ЛњаЕЪжЕФЯжзД……………………………………………………………………1
1.2 бЁЬтвтвх…………………………………………………………………...…….1
Ек2еТ змЬхЗНАИЩшМЦ…………………………………………………………………...3
2.1 баОПЛњаЕЪж……………………………………………………………………….3 [зЪСЯРДдДЃКhttp://www.doc163.com]
2.2 ЛњаЕЪжЛљБОаЮЪНбЁдё…………………………………………………………….3
2.3змЬхВМжУЩшМЦЃЌЛГізмЬхВМжУЭМ………………………………………….…….4
Ек3еТ ЛњаЕЯЕЭГЕФЩшМЦМЦЫу…………………………………………………..………5
3.1.1 ЖЏСІЕчЛњЕФбЁдё…………………………………………………………….…...5
3.1.2аЕЪжМаГжЗЖЮЇЩшМЦ………………………………………………………….……5 [зЪСЯРДдДЃКhttp://doc163.com]
3.2.1ЛЌЖЏЫПИмЩшМЦМЦЫу…………………………………………………….………....6
3.2.2 ЕчЛњЕФбЁдё……………………………………………………………….….......7
3.2.3 жББлЦјИзЕФбЁдё…………………………………………………………….…...8
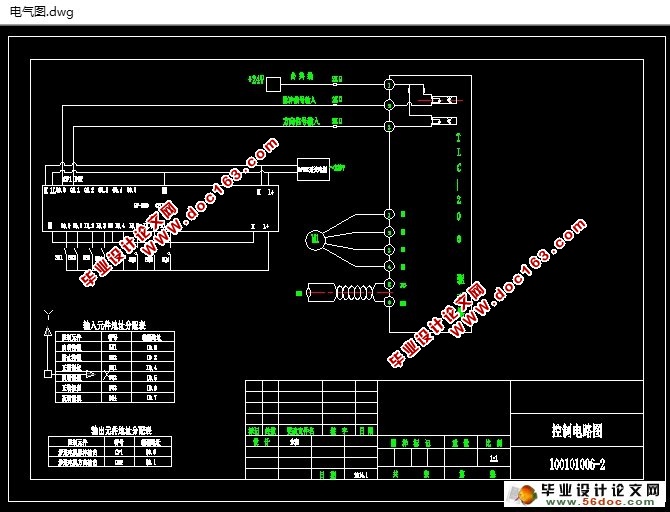
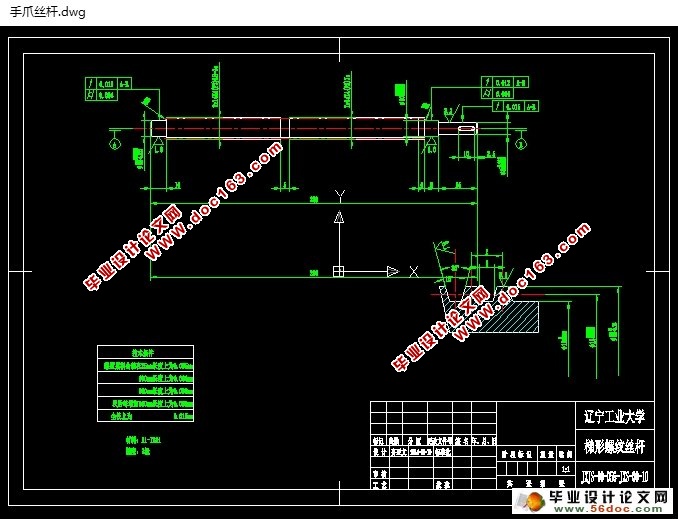
3.2.4 ЛњаЕЪжБлЩшМЦ……………………………………………………………….…...9
3.3 ЕчЛњСЊжсЦїЕФбЁдё………………………………………………………...........12 [РДдДЃКhttp://Doc163.com]
Ек4еТ ПижЦЯЕЭГЕФЩшМЦ………………………………………………………..............14
4.1ПижЦЦїЕФбЁдё………………………………………………………………..........15.
4.2 ПижЦЦїНсЙЙ…………………………………………………………………….…16
Ек5еТ НсТл………………………….…………………………………..…………...........17
ВЮПМЮФЯз……………………………………………………………………...…………….18
[РДдДЃКhttp://Doc163.com]
ЩЯвЛЦЊЃКЪ§ПиЦНУцФЅДВЩшМЦ(вКбЙЯЕЭГ)(CAD,CAXA,СуМўЭМ,зАХфЭМ,ЕчТЗЭМ)
ЯТвЛЦЊЃКТнФИздЖЏзъПзЛњЩшМЦ(CAD,CAXA,СуМўзАХфЭМ,вКбЙ,ЕчЦјЭМ)