
煤矿救灾机器人导航的激光测距系统研究设计(测控技术)

煤矿救灾机器人导航的激光测距系统研究设计(毕业论文说明书31000字,cad图纸5张)
摘 要
煤矿救灾机器人对实现煤矿灾后科学救灾,最大限度地减少人员伤亡和财产损失和提高我国煤矿安全事故的救灾水平具有非常重要的意义。但目前研制的煤矿救援机器人在导航控制过程中主要采用摄像头、陀螺仪和编码器等方式,这些导航控制方式在极端复杂的矿井灾后环境中存在着很大的局限性。为此,本文提出了基于激光测距的救灾机器人导航控制方法。
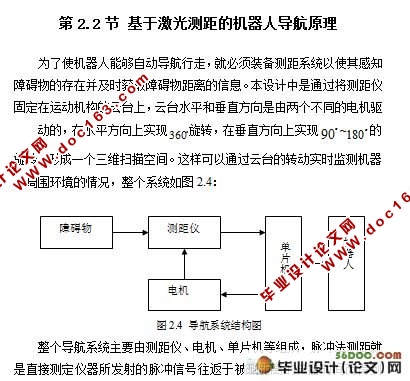
本文介绍了激光测距在煤矿救灾机器人导航中的工作原理。给出了整个导航系统主要构成:包括激光测距仪、电机、云台、单片机;利用脉冲法激光测距仪实现了机器人与障碍物之间距离测量,通过云台上的驱动电机带动测距仪的转动来改变激光测距测量方位,实时的测量出救灾机器人与周围障碍物的距离,并把最终的测量值传输到单片机中,用于机器人的导航及对障碍物做出及时响应,实现救灾机器人高效快速导航。
针对煤矿救援机器人要求研制了一种可以全方位转动的小型云台,完成了以单片机为核心的导航控制器的软硬件设计:包括脉冲激光发射和接收电路、时间分割和校准模块、采样模块、键盘输入模块和云台的驱动电路等。
最后对研制的导航控制系统进行了实时动态测量障碍物距离精度试验和不同材质障碍物的测距稳定性试验。结果表明,该系统能够实时的测量出机器人与障碍物的距离,满足救灾机器人导航控制的需要。 [资料来源:Doc163.com]
关键词:煤矿救灾机器人;激光测距;云台;导航; 微控制模块
在国外,救灾机器人发展迅速,技术日益成熟,并进入实用化阶段,日本、美国、英国等已开始装备使用。在灾难现场中,救灾机器人应迅速找到幸存者的位置。日本大阪大学研制出蛇形机器人,能在高低不平的模拟废墟上前进,其顶端带有一部小型监视器,身体安装传感器,可以在地震后的废墟里寻找幸存者。美国iRobot公司研制出了PackBot系列机器人,见图1.1,能适应崎岖不平的地形环境和爬楼梯,主要执行侦察任务、寻找幸存者、勘探化学品泄漏等任务。InuKtun公司研制了机器人MicroVGTV,见图1.2,机身可变位,采用电缆控制,含有直视彩色摄像头,并带有微型话筒和扬声器,可用于与压在废墟中的幸存者通话,适用于在小的孔洞和空间中执行任务。除了前面的中小型救灾机器人,微型救灾机器人也正在研究中,美国加州大学伯克利分校研制出了世界第一个苍蝇机器人,通过装在它脑袋上的微型传感器与微型摄像机,可以到倒塌的建筑物废墟底下或其他灾难场所寻找幸存者。
激光测距仪的基本原理
激光脉冲测距仪的工作过程大致如下:首先用瞄准光学系统瞄准目标,接着启动复位开关,复位电路给出复位脉冲,使整机复位,准备进行测距,同时触发脉冲激光器产生一个前沿陡峭、峰值功率高的激光脉冲。绝大部分激光能量经过发射光学系统压缩光束发散角后射向目标,这样的光脉冲射到几十公里远的地方,才只有几米直径的一个光斑。在脉冲发射出去的同时,该激光脉冲有极少量能量由光取样器直接送到激光接收系统(即极小一部分光立即由两块反射镜反射而进入接收光学系统),作为发射信号。而射向目标的光脉冲,由于目标的漫反射作用,总有一部分光从原路反射回来,而进入接收光学系统,这就是回波信号。发射信号和回波信号先后经过滤光片由光电探测器转变为电脉冲,并经放大电路放大后,输送给阈值电路。超过阈值电平的信号被送至脉冲整形电路整形。整形后的发射脉冲使T触发器翻转,控制计数器对晶体振荡器发出的时钟脉冲进行计数。整形后的回波信号使T触发器的输出翻转无效,从而使计数器停止工作。通过计数器累计出从激光发射至接收到目标回波期间所进入的时钟脉冲个数,就可根据晶体振荡器的振荡频率得到激光往返的时间,计算出目标距离。为了使光束对准目标发射,接收光学系统对准目标接收,一般要求瞄准光学系统、发射光学系统和接收光学系统三条光轴严格平行[12]。
[资料来源:http://www.doc163.com]
Abstract
Coal mine disaster relief robot plays an indispensable role in providing post-disaster relief scientifically, reducing casualties and property losses to the full extent and improving our coal mine safety accident rescue capacity. However, the current development of coal mine rescue robot in the process of navigation control is mainly confined to cameras, gyro and encoder. Unfortunately, there exists great limitations in extreme sophisticated mine post-disaster. Therefore, this paper proposes a rescue robot navigation control method based on laser range finder.
The paper introduces work principles that how laser rangefinder be applied in navigation robot in the process of coal mine disaster relief. It presents the main constitution of navigation system, including laser range-finders, motor, laser rangefinder, SCM. Using pulse laser rangefinder makes it possible to measure the distance between the robot and obstacles. What’s more, through the rangefinder rotation driven by electrical motor on the haewundae, the laser rangefinder measuring position can be changed. In this way, the distance between rescue robot and the surroundings can also be fixed in time, thus the final measured value will be transmitted to the SCM, which is helpful to robot navigation and for obstacles to make timely response, and ultimately contribute to the efficient and fast navigation robot disaster relief.
In the light of mine rescue robot, a small type of hereunder which rotates in an all around way can be developed. In addition, the software and hardware that focus on SCM had been designed, including the pulse laser emitting and receiving circuit, time division and calibration module, sampling module, keyboard input module and haewundae driving circuit, etc.
Finally this paper realized timely dynamic measurement precision testing and obstacle distance of different materials ranging stability test. The result demonstrated that this system can measure the distance between robot and obstacles, catering to the need of disaster robot navigation control.
Keywords: mine rescue robot, Laser rangefinder, Hereunder, Navigation, Micro control module
[资料来源:Doc163.com]

[来源:http://Doc163.com]
目 录
第1章 绪论 10
第1.1节 课题意义 10
第1.2节 国内外研究现状 12
1.2.1 煤矿救灾机器人国外研究现状 12
1.2.2 煤矿救灾机器人国内研究现状 15
第1.3节 激光测距在救灾机器人导航中的应用 17
第2章 激光测距及导航原理 20
第2.1节 脉冲法激光测距原理 21
2.1.1脉冲式测距仪的原理结构 21
2.1.2激光测距仪的基本原理 22
第2.2节 基于激光测距的机器人导航原理 27
第2.3节 救灾机器人导航系统的整体功能介绍 28
2.3.1 救灾运动机器人的计算 28
2.3.2 救灾机器人运动的控制 30
2.3.3 救灾机器人导航系统介绍 32
第3章 救灾机器人导航系统组成及硬件设计 33
第3.1节 导航系统的主要组成部分 33
3.1.1 激光脉冲测距仪及其参数 33
[来源:http://www.doc163.com]
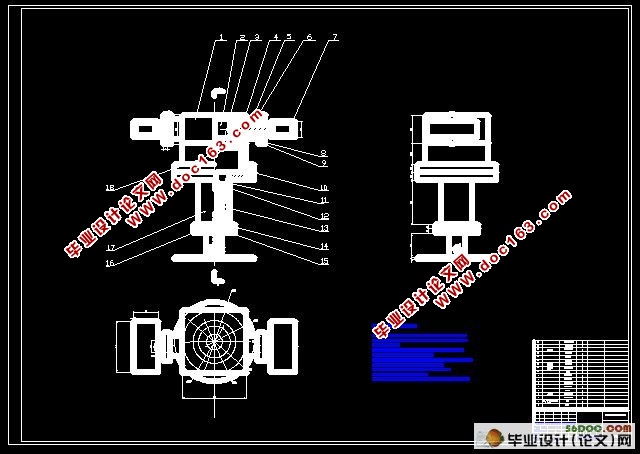
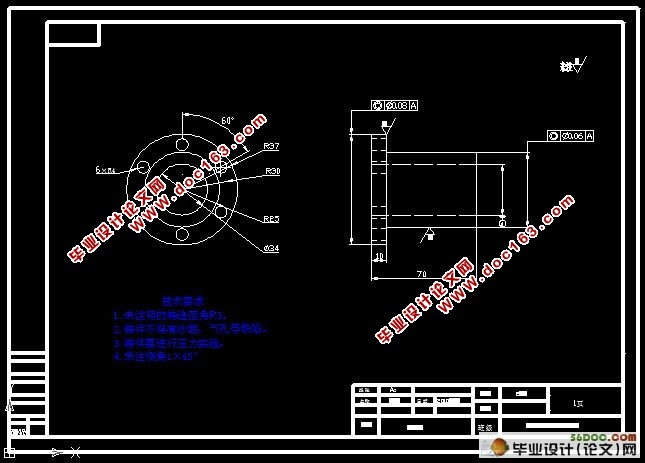
第3.2节 机械转动云台的设计 35
3.2.1 电动云台的概述 35
3.2.2 电动云台设计方案的确立 35
第4章 激光测距仪电路原理 44
第4.1节 激光测距仪的电路模块 44
4.1.1激光发射驱动电路 44
4.1.2.接收电路 47
4.1.3放大电路 51
第4.2节 激光测距导航系统电路的硬件设计 53
4.2.1 微控制器部分(MCU) 53
4.2.2 时间分割和校准模块 55
4.2.3 控制A/D采样模块 57
4.2.4 温度补偿模块 59
4.2.5 键盘输入模块 61
第5章实验及结果分析 65
附录 67
中英文翻译 80
参考文献 94
致 谢 97
[资料来源:www.doc163.com]