
倒车雷达系统的研究与设计

摘 要
汽车倒车雷达是针对当前公路、街道、停车场、车库等越来越拥挤,加上存在视觉盲区,无法看见车后的障碍物,司机在倒车时很容易刮伤汽车,甚至发生事故的情况而出现的一种旨在倒车防护的汽车防撞系统。该系统能够在汽车以较低的速度进行倒车的过程中,识别出车后部的障碍物,并能够测量车与障碍物之间的距离,在车辆与障碍物发生碰撞前,发出声光报警,提醒司机刹车。本设计从实验研究分析的角度,分析了超声波测距原理以及国内外此类汽车倒车雷达存在的问题,提出了目前最简单、实用的一种倒车雷达实现方案,即基于成都国腾微电子公司GM3101倒车雷达芯片为核心的超声波测距倒车雷达,该芯片功能集成度高,外围只需接上超声波传感器和功率器件就可以实现整个系统功能,也不需要软件编程。同时设计中围绕目前呼声很高的汽车电器网络化实现,提出倒车雷达数据基于新型总线XY-CN BUS的传递方案。系统设计中采用了模块设计思想,简化了调试工作量,最终很好完成了超声波测距倒车雷达系统的硬件设计、软件设计及系统调试。(毕业设计网 )
关键词:汽车倒车雷达 超声波 GM3101芯片 XY-CNBUS 汽车电器网络化
[资料来源:http://www.doc163.com]
Abstract
Automobile Reversing Radar (‘ARR’) is a protection system which appeared in the condition of that the cars are scratched easily, even some of the accidents happen when drivers reverse, for the reason of that the current highway, street, parking lots and garages are getting more crowded, and the drivers are unable to see obstacles behind the vehicle because of the existence of visual blind spots, aimed at prevent a car crash when reversing. The reversing radar system, which can recognize the barrier at the back of car when the vehicles reverse at a low speed, and is capable of measuring the distance between the vehicle and obstacles, warned the drivers to brake at the way of sound and light, before the collision occurred. The design analyzes how the ultrasonic measure distance and what the problem of the other automobile reversing radars which have appeared at home and abroad are, from the perspective of research and analysis. Then introducing the most simple and practical way at present to make the ARR, that is, the ARR based in the GM8101 chip which produced in ChengDuGuoTeng Microelectronics Company. The chip is integrated highly, can function as a whole system by only connecting to external ultrasonic sensor and power device, and does not require software programming. Meanwhile, as the research about realizing the vehicle electrical network is becoming more and more popular today, a program that the data of the ARR is transferred in a new kind of bus called as XY-CN. A modular design concept was used at the process of designing the system, it simplifies the debugging workload. Ultimately, hardware design, software design and system debugging about the ARR was completed very well.
[来源:http://www.doc163.com]
Keywords:Automobile Reversing Radar ultrasonic GM3101 XY-CN BUS realization of the vehicle electrical network
系统总体方案设计
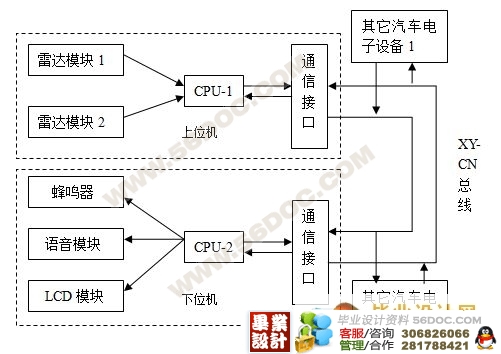
本系统基于超声波反射原理利用成都国腾微电子公司生产的GM3101倒车雷达专用控制芯片控制超声波传感器进行超声波发射接收实现障碍物探测。传感器布置为车后四个或多个传感器方式,尾部的传感器探测倒车时汽车后方障碍物, 通过总线形成网络进行信息通信, 再由主控制器适时显示障碍物距离、位置并进行声音报警, 司机根据这些重要提示可大大减小汽车碰撞的可能。
其中,雷达模块指的是图2-1中所示的以GM3101芯片为核心的组合电路,可根据实际情况决定是否采用两个或多个雷达模块,在本次设计中用到了两个雷达模块。总线上所连的其它汽车电子设备是总线设备扩展,本设计中实际没有扩展连接其它汽车电子设备,该总线有可接多达400个设备节点的容量,通信速率也非常高。下位机中CPU所连接的模块,也是根据实际情况,可以有所增减。由于时间问题,该设计中没有做到语音模块。
[来源:http://Doc163.com]
概述
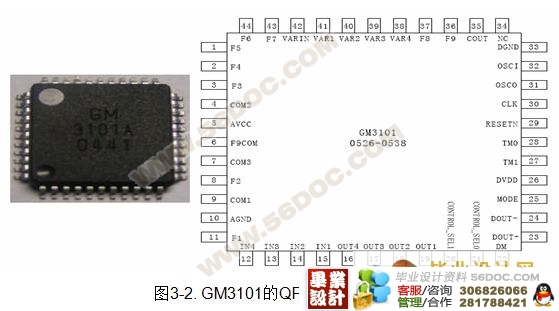
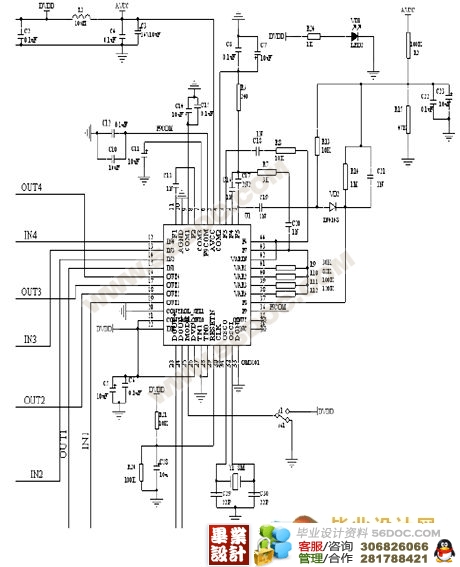
GM3101倒车雷达专用控制芯片,用纯硬件ASIC方式实现倒车雷达主机功能,将倒车雷达需要的主要元件(控制器、运放电路、滤波电路等)都集成在了单一芯片中,外围只需接上超声波传感器和功率器件就可以实现整个系统功能,提高了系统集成度,也不需要软件编程,是目前最简单的一种倒车雷达实现方案。该芯片提供4 路超声波探头的驱动,并根据超声波特性和倒车雷达的使用环境进行了一系列智能化处理,在保证超声波测距精确性的基础上,更加强了报警功能的准确性和实用性。测试结果编码后采用双线差分方式输出,提高了信号传输的抗干扰性。GM3101 可为倒车雷达系统提供最简单的单芯片控制方案,替代现有的单片机控制方案。该芯片的优势在于尽可能地为倒车雷达系统提高集成度,减少外围元件。同时该芯片的功能满足高端和通用性的要求,用户利用该组芯片既可以生产高性能的整机产品,还可以灵活设置其产品的报警方式。全硬件方式实现系统功能,既降低了用户的开发难度,更对系统性能有了显著的提高。
[资料来源:http://doc163.com]




目 录
中文摘要 Ⅰ
Abstract Ⅱ
目 录 Ⅲ [资料来源:Doc163.com]
第一章 绪论 1
1. 1 研究背景 1
1. 2 发展概况和当前存在的问题 1
1. 2. 1 发展概况 1
1. 2. 2 当前存在的问题 4
1. 3 本设计的主要内容和目的 5 [资料来源:http://doc163.com]
第二章 系统相关理论与结构 6
2. 1 超声波的测距基本原理 6
2. 2 XY-CN总线介绍 7
2. 2. 1 概述 7
2. 2. 2 系统由来 8
2. 2. 3 XY-CN BUS型总线特点 9 [来源:http://Doc163.com]
第三章 硬件设计及调试 11
3. 1 系统总体方案设计 11
3. 2 GM3101芯片 12
3. 2. 1 概述 12
3. 2. 2 工作特征 12
3. 2. 3 封装及引脚功能说明 13
3. 2. 4 芯片具体功能及应用 13
3. 3 XY-CN BUS专用数字通讯芯片 15
3. 3. 1 CMT001芯片 15
3. 3. 2 CMT001芯片应用参考电路 16
3. 3. 3 CMT100芯片 17
3. 3. 4 CMT100 芯片应用参考电路 17
3. 4 系统电路解析及工作原理 18
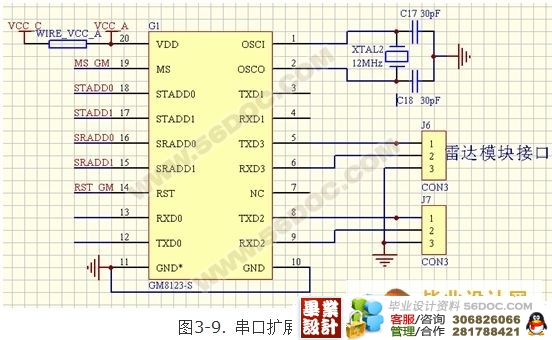
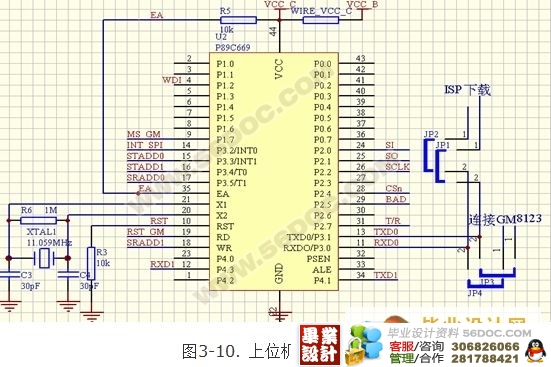
3. 4. 1 上位机电路解析 18
3. 4. 2 下位机电路解析 22
3. 4. 3 工作原理 24 [资料来源:http://doc163.com]
3. 5 实验安装及调试 24
3. 5. 1 焊接 24
3. 5. 2 调试过程及方法 25 [资料来源:https://www.doc163.com]
第四章 软件设计及调试 27
4. 1 系统软件设计整体介绍 27
4. 2 上位机软件设计 28
4. 2. 1 上位机程序主流程图 28
4. 2. 2 雷达模块程序设计 29
4. 2. 3 上位机接收数据程序设计 30
4. 2. 4 上位机发送数据程序设计 30
4. 3 下位机软件设计 32
(毕业设计网 )
4. 3. 1 下位机程序主流程图 33
4. 3. 2 下位机接收数据程序设计 34
4. 3. 3 LCD液晶显示程序设计 35
4. 4 软件调试简介 35
第五章 系统可扩展部分 37
[资料来源:https://www.doc163.com]
结束语 38
主要参考文献 39
致谢词 40 [资料来源:http://www.doc163.com]
主要参考文献 [资料来源:Doc163.com]
[1] 王欢. 基于CAN总线的倒车雷达研究. 哈尔滨工业大学,2005.6
[2] Wargui M,Rachid A. Application of controller area network to mobile robots. 8th Mediterranean Electrotechnical Conference, 1996: 205一207
[3] 杨明发. 高性价比倒车雷达的研究.《机电技术》季刊,福建省机械科学研究院,2004年01期, pp30-31
[4] 何希才. 集成电路及其应用实例. 科学出版社,1998.2
[5] 丁镇生. 传感器及遥测技术. 电子工业出版社, 1998.5
[6] GM3101数据手册V3.4. 成都国腾微电子有限公司,2006.4
[7] 曦阳CMT001数据手册. 曦阳家居智能化科技发展有限公司,2006.10.28
[8] 曦阳CMT100数据手册. 曦阳家居智能化科技发展有限公司,2006.10.28
[9] 图像点阵液晶显示模块使用手册. 广州捷胜吉电子科技有限公司,2004.5
[10]刘东. 循环冗余校验 CRC 的算法分析和程序实现. 西南交通大学计算机与通信工程学院,2001
[11] 刘衡. 实用现代汽车电器. 电子工业出版社,1999.9 [资料来源:http://doc163.com]