
基于单片机的汽车倒车系统设计(超声测距报警)

资料介绍:
基于单片机的汽车倒车系统设计(超声测距报警)(任务书,开题报告,中期报告,毕业论文,33000字,程序代码)
摘 要
随着社会经济的发展和交通运输业日益兴旺,汽车的数量在大幅攀升。越来越多的人拥有了自己的汽车,同时由泊车和倒车所引发的事故也越来越多。针对这种情况,设计一种响应快,可靠性高且较为经济的汽车防撞预警系统势在必行。因此,有助于驾驶员泊车和倒车的倒车报警器应运而生。
本文详细介绍了一种基于单片机的脉冲反射式超声测距报警系统。本设计主要以AT89S52单片机芯片为核心,利用超声波的特点和优势,将超声波测距系统和AT89S52单片机结合于一体,显示超声波测距的设计方法。阐述了超声波传感器的原理及特性,整个电路采用模块化设计,由主程序、预置子程序、发射子程序、接收子程序、显示子程序、报警子程序等模块组成。论文介绍了系统的主要软件结构,通过编写程序来实现系统功能。硬件电路包括滤波电路、放大电路和整形电路。最后,分析影响系统的因素和通过对系统的误差分析,给出了系统的改进方案。
这套系统软硬件设计合理、抗干扰能力强、实时性良好,经过系统扩展和升级,可以实现汽车倒车报警。
关键字:单片机,超声波传感器,测距,汽车倒车系统,报警
[资料来源:http://Doc163.com]
ABSTRACT
With the development of social economy and transportation industry is booming, the number of cars in greatly increased. More and more people have their own cars, the accidents caused by parking and reversing had increased at the same time. In view of this situation, design a kind of fast response, high reliability and cheaper the automotive anti-collision warning system is imperative. Therefore, help drivers parking and of reversing the reverse alarm arises at the historic moment.
This paper introduces a kind of based on microcontroller pulse reflecting type ultrasonic ranging measuring alarm system. This design mainly AT89S52 microcontroller core, using ultrasonic sensors for the features and advantages of the ultrasonic ranging system, combining the ultrasonic ranging system AT89S52 microcontroller, display ultrasonic ranging design method. Expounds the principle and characteristics of ultrasonic sensor, the entire circuit USES modular design, the main program, preset subroutines, launch subroutines, receiving subroutines, display subroutines, alarm subroutines etc module. This paper introduces the main software structure, system by writing a program to achieve system function. Hardware circuit including filter circuit, amplifying circuit and shaping circuit. Finally, analyzes the influential factors and through the system error of the system analysis, presented system improvement plan.
[资料来源:https://www.doc163.com]
The system hardware and software design is reasonable, strong anti-jamming capability, good real-time performance, after system extension and upgrades, can effectively solve auto reverse alarm system.
Keywords:microcontroller, ultrasonic sensors, ranging, auto reversing system ,alarm
系统总体方案设计
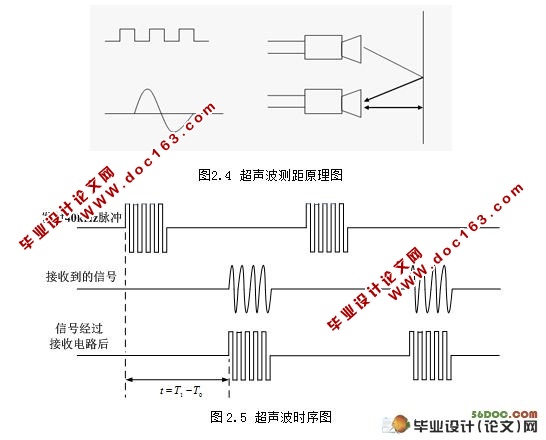
由于超声波的指向性比较强,能量消耗也比较的缓慢,在介质中传播的距离较远,而在空气中的传播速度随着环境的变化差异不是很大,因而超声波经常用于距离的测量。利用超声波检测距离,设计比较方便,计算处理也较简单,只要知道发射波和接收波的时间差就可以了,并且在测量精度方面也能达到农业生产等自动化的使用要求。
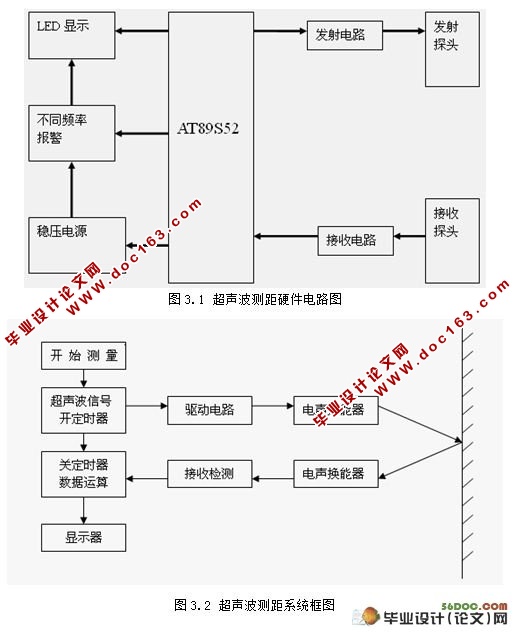
而硬件设计要按照上面的电路图来设计,由发射电路控制发射探头发射超声波,遇到障碍物后超声波会返回,回波经过接收探头,通过脉冲计算中间的时间差,经过AT89S52单片机中处理器计算出障碍物的距离,而经过AT89S52单片机后LED会显示出距离,而设定一个临界值,低于这个临界值就报警。
系统各组成单元设计
该系统主要由以下功能块系统构成:超声波传感器T/R40-16、超声波发射与接收构成的收发系统;中央控制处理器AT89S52组成的主机系统;控制报警输出系统和稳定电压等。
[资料来源:www.doc163.com]
主要的系统电路有:电源电路、超声波发生器、超声波发射电路、超声波接收电路、信号放大电路、复位电路、显示电路、报警电路等。
超声波测距单片机系统设计
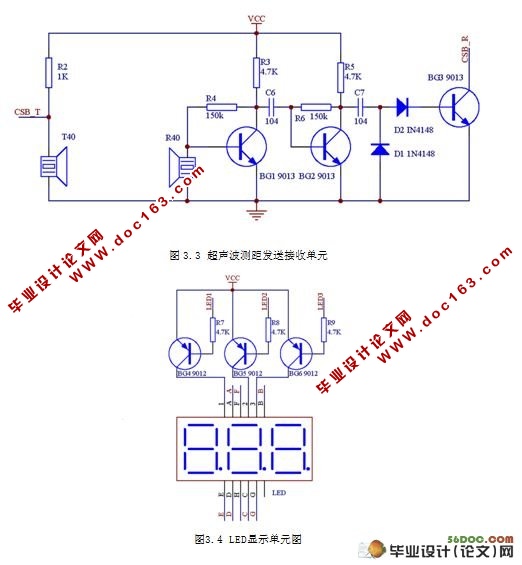
本系统由单片机AT89S52控制,包括单片机系统、发射电路与接收放大电路、报警系统和显示电路几部分组成。硬件电路的设计主要包括单片机系统及显示电路、超声波发射电路和超声波接收电路三部分。单片机采用AT89S52。采用12MHz高精度的晶振,以获得较稳定时钟频率,减小测量误差。超声波接收头接收到反射的回波后,经过接收电路处理后,向单片机输入一个低电平脉冲。单片机控制着超声波的发送,超声波发送完毕后,立即启动内部计时器 计时,当检测到单片机由高电平变为低电平后,立即停止内部计时器计时。单片机将测得的时间与声速相乘再除以2即可得到测量值,最后经3位数码管将测得的结果显示出来。
单片机AT89S52发出短暂的40kHz信号,经放大后通过超声波换能器输出;反射后的超声波经超声波换能器作为系统的输入,锁相环对此信号锁定,产生锁定信号启动单片机中断程序,读出时间t,再由系统软件对其进行计算、判别后,相应的计算结果被送至LED数码管进行显示。
限制超声波系统的最大可测距离存在四个因素:超声波的幅度、反射物的质地、反射和入射声波之间的夹角以及接收换能器的灵敏度。接收换能器对声波脉冲的直接接收能力将决定最小可测距离[15]。
[版权所有:http://DOC163.com]
主程序设计及其流程图
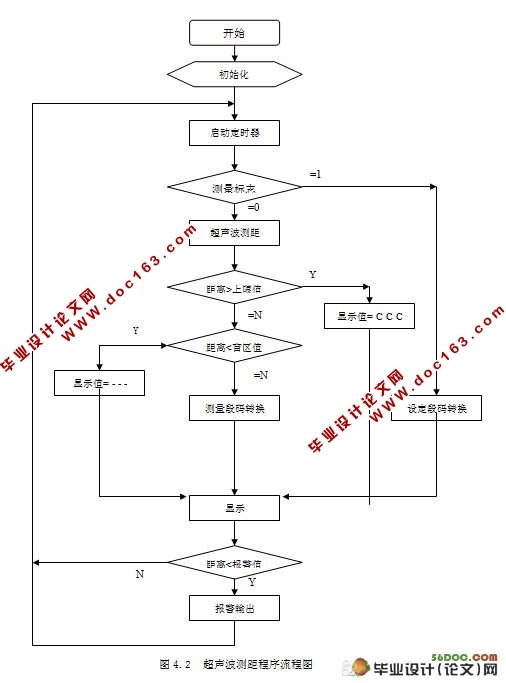
超声波测距的软件设计主要由主程序、超声波发生子程序、超声波接收程序及显示子程序组成。超声波测距的程序既有较复杂的计算(计算距离时),又要求精细计算程序运行时间(超声波测距时),所以控制程序可采用C语言编程。
主程序首先是对系统环境初始化,设定时器0为计数,设定时器1定时。置位总中断允许位EA。进行程序主程序后,进行定时测距判断,当测距标志位cl==1,即进行测量一次,程序设计中,超声波测距频度是2次/秒。测距间隔中,整个程序主要进行循环显示测量结果。当调用超声波测距子程序后,首先由单片机产生6-8个频率为38.46kHz超声波脉冲,加载的超声波发送头上。超声波头发送完送超声波后,立即启动内部计时器T0进行计时,为了避免超声波从发射头直接传送到接收头引起的直射波触发,这时,单片机需要延时约1.5 -2ms时间(这也就是超声波测距仪会有一个最小可测距离的原因,称之为盲区值)后,才启动对单片机P3.7脚的电平判断程序。当检测到P3.7脚的电平由高转为低电平时,立即停止T0计时。由于采用单片机采用的是12 MHz的晶振,计时器每计一个数就是1μs,当超声波测距子程序检测到接收成功的标志位后,将计数器T0中的数(即超声波来回所用的时间)来计算,即可得被测物体与测距仪之间的距离。 [来源:http://Doc163.com]
[来源:http://Doc163.com]