
基于单片机的智能避障小车的设计
基于单片机的智能避障小车的设计(任务书,开题报告,外文翻译,论文12000字)
摘 要
随着汽车工业的快速发展,汽车智能化的研究对于我国在世界高科技领域占据领先地位具有重要作用。
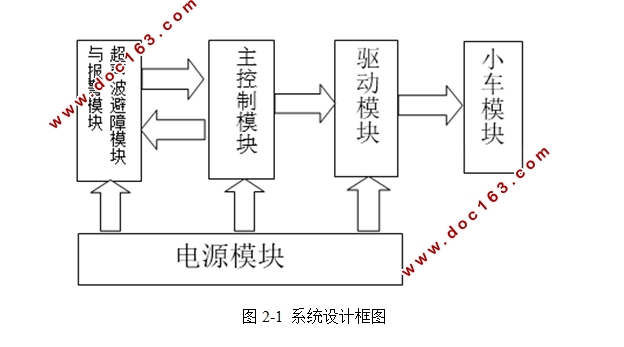
本文开展了基于单片机的智能避障小车的设计,首先详细介绍了整个设计的方案,阐述了超声波避障的原理、系统各模块硬件选择以及软硬件的设计过程。本文设计系统主要由单片机控制模块、电机驱动模块、超声波避障模块、蜂鸣器报警模块与LED显示模块组成。STC89C52RC单片机通过超声波检测接受到的信息来控制电机运行,当小车与障碍物距离过小时,报警模块会发出警报。系统的软件部分包括主程序、电机驱动程序及距离检测程序,通过小车运行时检测到的运行信息来调用转弯、直行或停止函数来控制小车。
通过测试,确定本设计的各个模块的功能均已达到本设计的所有要求。
关键词:STC89C52RC 小车 超声波避障 单片机
The intelligence obstacle avoidance car based on SCM
Abstract
With the rapid development of automobile industry, doing the research about the intelligent vehicle will be very important about that China can occupy a leading position in the field of high technology in the world. [资料来源:http://www.doc163.com]
In this paper, the car based on MCU intelligence obstacle avoidance is carried out, the plan of the whole design will be explicitly introduced, about the principle of ultrasonic obstacle avoidance, the introduction of overall system design and related software. This design is mainly composed of single-chip microcomputer control system module, motor drive module, the ultrasonic obstacle avoidance module, buzzer alarm module and LED display module. System with STC89C52RC single-chip microcomputer as the core, through the obstacle avoidance module receives information to control the motor running. The software part includes the main program, motor driver, signal detection procedures, through the car runs the operation of the detected information call to turn left, go straight, or stop function to control the car.
It is sure that the function of each module has all met the requirements in this design.
Key words: STC89C52RC; cars; ultrasonic obstacle avoidance; SCM
[资料来源:http://Doc163.com]


目录
摘 要 I
Abstract II
第一章 绪 论 1
1.1引言 1
1.2 智能小车系统概述 1
1.3 论文的内容与结构 2
1.3.1 论文的主要任务 2
1.3.2 论文的结构 2
[资料来源:www.doc163.com]
第二章 系统方案设计 3
2.1 硬件方案选择 3
2.1.1 车轮结构选择 3
2.1.2 电源选择 4
2.1.3 避障模块的选择 4
2.1.4 单片机的选择 5
2.1.5 驱动电机模块的选择 5
2.2软件设计思想 6
第三章 系统硬件设计 7
3.1供电电路 7
3.2超声波避障模块 8
3.2.1 超声波特性及测距原理 8
3.2.2 元件介绍 9
3.2.3电路设计及工作原理 10
3.3电机驱动电路 11
3.3.1元件介绍 11
3.3.2电路设计及工作原理 13
3.4声音报警电路 14
3.5 LED显示电路 15
3.6主控制模块 16
3.7本章小结 16
第四章 软件设计 17
4.1 软件调试平台 17
4.2程序的设计 18
4.2.1总体流程图 18
4.2.2超声波测距子程序 19
4.2.3 L293D电机驱动子程序 22
4.2.4 报警和显示模块 25
4.3本章小结 27
第五章 系统调试及结果 28
5.1 硬件调试 28
5.2 软件调试 28
5.3实物调试检测 29
5.4硬件展示 30
第六章 总结与展望 32
参考文献 33
致谢 34
附录 代码 35 [来源:http://www.doc163.com]