
智能驾驶控制系统的设计(含电路原理图,程序代码)
智能驾驶控制系统的设计(含电路原理图,程序代码)(开题报告,论文11000字,电路原理图,程序代码)
摘 要
在电子控制技术发展的背景下,智能控制技术被应用于社会各个领域。智能驾驶技术在传统汽车控制的基础之上进行技术革新,依托于电子控制理论、图像处理技术、传感器信息检测等多学科即使,已经发展成为控制研究领域的热门话题,各个国家展开智能车辆的研发中去,设计研发了车辆辅助驾驶系统。本设计围绕智能驾驶控制系统展开,以STC89C52单片机作为系统控制器,系统采用2个直流电机进行驱动,实现智能驾驶控制系统的前进后退等运动功能,电机的驱动电路采用L298驱动模块实现;通过加入红外遥控的功能,用户可以通过遥控来控制智能小车进行移动;应用反射式红外对管传感器实现小车循迹功能;应用HC-SR04超声波模块实现小车自动避障功能。本设计对硬件电路和软件程序分别进行模块化的设计,同时通过制作实物来验证系统设计的功能。通过实物功能调试结果来看,本设计基本满足设计目标,能够实现智能驾驶控制系统的控制要求,具有重要的实用价值。
关键词: 智能小车;超声波;单片机;遥控
Abstract
In the context of the development of electronic control technology, intelligent control technology has been applied to various fields of society. Intelligent driving technology carries out technological innovation on the basis of traditional vehicle control. Relying on electronic control theory, image processing technology, sensor information detection and other multi-disciplines, it has developed into a hot topic in the field of control research, and various countries have carried out research and development of intelligent vehicles. In the past, the vehicle assisted driving system was designed and developed. This design revolves around the intelligent driving control system, using STC89C52 microcontroller as the system controller, the system is driven by 2 DC motors to realize the forward and backward motion functions of the intelligent driving control system, and the driving circuit of the motor is realized by the L298 drive module; by adding With the function of infrared remote control, the user can control the smart car to move through the remote control; the reflective infrared pair-tube sensor is used to realize the car tracking function; the HC-SR04 ultrasonic module is used to realize the automatic obstacle avoidance function of the car. In this design, the hardware circuit and software program are modularized respectively, and the function of the system design is verified by making the real object. Judging from the physical function debugging results, this design basically meets the design goals, can achieve the control requirements of the intelligent driving control system, and has important practical value. [资料来源:https://www.doc163.com]
key word: Smart car; ultrasonic; singlechip; remote control
系统整体方案设计
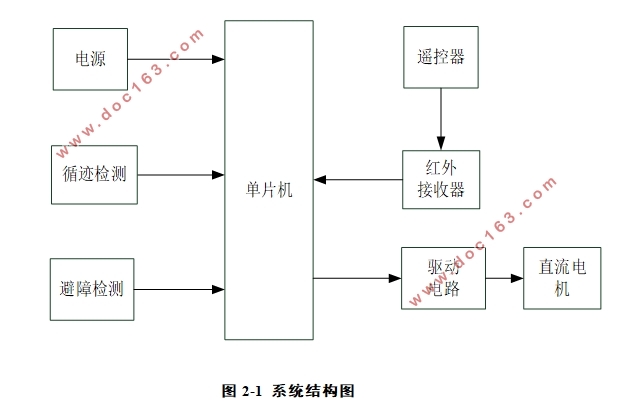
在智能驾驶控制系统设计中结合单片机控制技术、传感器检测技术实现小车驱动、红外遥控控制、循迹、避障等设计功能。根据设计要求绘制出如图2-1的系统结构框图。整个系统采用STC89C52单片机为控制器,其中:智能驾驶控制系统一共采用2个直流电机进行驱动,实现智能驾驶控制系统的前进后退等运动功能,电机的驱动电路采用L298驱动模块实现;通过加入红外遥控的功能,用户可以通过遥控来控制智能小车。循迹采用反射式红外对管传感器,避障采用HC-SR04超声波模块实现。

目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外发展现状 1
1.3 本文主要内容 2
第2章 系统总体设计 4 [来源:http://Doc163.com]
2.1系统整体方案设计 4
2.2 嵌入式微控制器的选择与论证 4
2.3 显示屏方案选型 6
2.4 电机驱动芯片选型 7
2.5 避障方案选择 8
第3章系统硬件设计 10
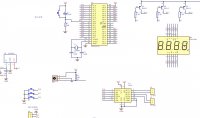
3.1主控制器电路设计 10
3.2 红外遥控电路 11
3.3 直流电机驱动电路 12
3.4 数码管显示电路 13
3.5 红外循迹模块设计 14
3.6超声波避障模块 15
第4章 系统软件设计 16
4.1 软件开发环境 16
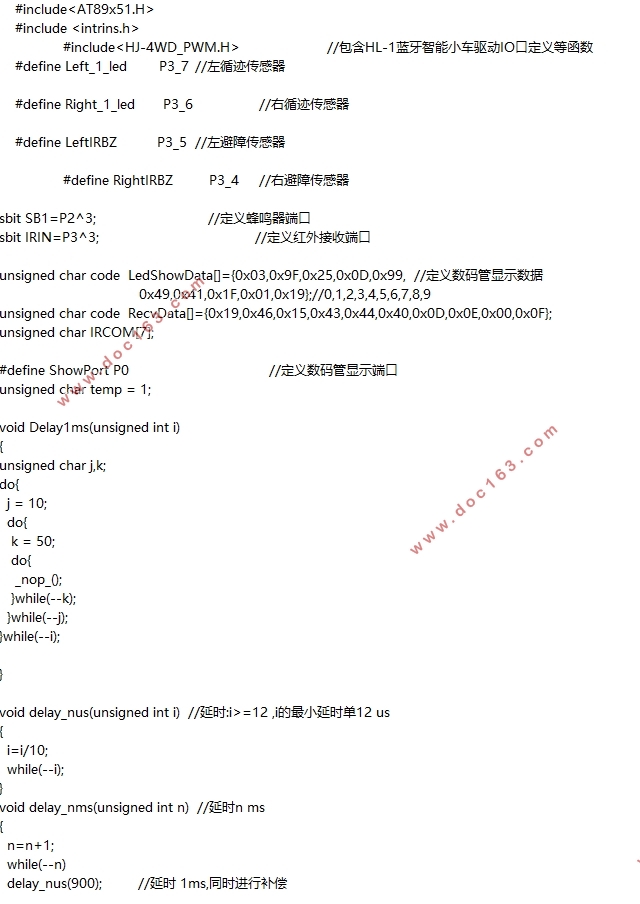
4.2 主程序设计 16
4.3 红外遥控程序设计 17
4.4 数码管显示程序设计 18
第5章 系统测试 20
5.1硬件调试 20
5.2软件调试 20
结论 23
致谢 24
参考文献 26
上一篇:传感器在农业大棚中的应用
下一篇:基于单片机的自动亮度路灯设计(含电路原理图,程序代码)