
基于单片机的智能迎宾机器人设计
基于单片机的智能迎宾机器人设计(开题报告,论文14400字)
摘要
本文首先对迎宾机器人的研究背景、发展前景以及国内外发展现状做了介绍,并说明了本设计所要研究的主要内容,包括迎宾机器人系统所要实现的功能和设计思路。接着进行了该迎宾机器人系统的整体方案的设计,然后分各个模块进行单独的设计,包括各自器件的选择。在该智能迎宾机器人设计中,采用红外检测、LCD显示、语音芯片、舵机控制技术和单片机技术相结合,当有行人进出时,E18-D50NK-N红外避障传感器将检测到的信号发送到单片机STC89C52,单片机通过处理使得ISD1820语音模块发出相应的语音提示,并让LCD12864显示对应的文字,再通过舵机MG995加以简单的动作控制,让顾客感受到便捷与新奇的人性化服务。这样的大体方案确定后就开始进行整个系统的硬件电路设计和软件流程设计,然后通过软件仿真模拟验证该迎宾机器人系统的可行性,最终经过完成了硬件调试。
关键词:迎宾机器人 传感器 语音芯片 LCD 舵机
The design of greeting guests robot system based on MCU
ABSTRACT
First of all, the research background, the development prospect and development present situation at home and abroad of greeting guests robot were introduced. And explained the main content of this design to study, including hospitality robot system to realize the function and design ideas. Then the robot receptionists system overall scheme design, each module separate design, then points including the selection of their devices. In the design of greeting guests robot system, infrared detection, LCD display, voice chip, servo control and single-chip microcomputer technology was combined. When a pedestrian access, E18-D50NK-N infrared obstacle avoidance sensor will detect the signal which will be sent to the MCU STC89C52. MCU will process the signal and make ISD1820 voice module sends the corresponding voice prompt, and let the LCD12864 display corresponding text, again by the movements of the steering gear MG995 to simple control, make the customer feel convenient and novel humanized service. Hardware circuit design and software flow design of the whole system began after the general program of the whole system, and then through software simulation verify the feasibility of the robot receptionists system, finally after completing the hardware debugging. [资料来源:http://doc163.com]
Key words: Greeting guests robot; Sensor; Voice chip; LCD; steering gear
[来源:http://Doc163.com]
目 录
摘要 I
ABSTRACT II
第一章 绪论 1
1.1 课题研究的背景和意义 1
1.1.1 背景 1
1.1.2 发展前景分析 1
1.1.3 迎宾机器人系统的发展现状及特点 1
1.2 课题研究的主要内容 2
第二章 迎宾机器人系统的主要功能和方案设计 3
2.1 主要功能 3
2.2 迎宾机器人系统的整体方案 3
2.2.1 迎宾机器人系统的工作原理 3
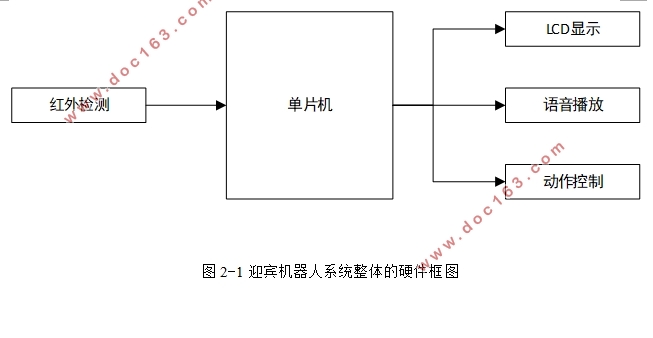
2.2.2 迎宾机器人系统的整体硬件框图 4
2.3 不同模块的方案设计 4
2.3.1 单片机方案的设计 4
2.3.2 红外检测模块方案的设计 5
2.3.3 LCD显示模块方案的设计 6
2.3.4 语音播放模块方案的设计 6
2.3.5 动作控制模块方案的设计 7
2.4 小结 7
第三章 迎宾机器人系统的硬件电路设计 9
3.1 单片机最小系统电路 9
3.1.1 晶振电路模块 9
3.1.2 复位电路模块 10
3.2 红外检测电路 11
3.3 LCD显示电路 11
3.4 语音播放电路 13
3.5 动作控制电路 14
3.6 小结 14
第四章 迎宾机器人系统的软件设计 15
4.1 总体程序流程设计 15
4.2 初始化流程 16
4.2.1 OLED初始化 16 [资料来源:https://www.doc163.com]
4.2.2 定时器初始化 19
4.2.3 定时器中断流程 20
4.3 红外检测部分 20
4.4 LCD显示部分 22
4.5 语音播放部分 23
4.6 动作控制部分 24
4.7 小结 25
第五章 迎宾机器人系统调试 26
5.1 软件调试 26
5.2 硬件调试 29
5.2.1调试过程 29
5.2.2调试结果 30
5.3 本设计存在的问题 32
结 语 33
参考文献 34
致 谢 37
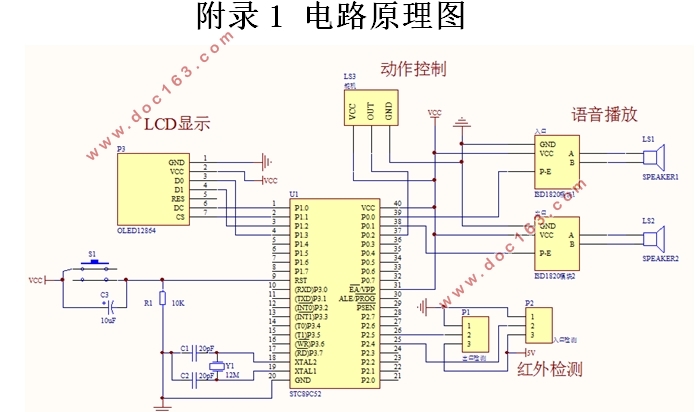
附录1 电路原理图 38
附录2 硬件实物图 38