
基于STM32单片机的擦玻璃机器人控制系统设计

基于STM32单片机的擦玻璃机器人控制系统设计(任务书,开题报告,外文翻译,论文15000字)
摘 要
本课题以新型擦玻璃机器人为对象,开发其基于STM32单片机的控制系统。主要完成的设计工作包括:
(1)进行机器人功能分析,明确机器人硬件功能模块;
(2)基于STM32设计控制系统硬件、搭建嵌入式软件架构、并开发其基本功能模块的控制程序;
(3)制备了控制系统样机,进行初步的样机实验。实验结果表明,控制系统能够实现对机器人擦拭玻璃的控制。
关键词:擦玻璃机器人 控制系统 STM32 电流检测 PWM控制
Abstract
In this topic, a new glass-wiping robot is targeted and its control system based on STM32 is developed. The main completed design work includes:
(1) Carry out robot function analysis and define the robot hardware function module;
(2) Design control system hardware based on STM32, build embedded software architecture, and develop control programs for basic functional modules;
(3) Prepare a control system prototype and carry out the design and verification of the implementation technology.After the commissioning is completed, the control system can drive the robot to wipe the glass. [来源:http://Doc163.com]
Keywords: glass-wiping robot ;control system; STM32; current detection; PWM control
1.3课题的主要任务
本课题拟在设计一款擦玻璃机器人控制系统,使得该机器人能够自动完成擦玻璃的工作,主要研究内容如下:
(1)进行机器人功能分析,明确机器人硬件功能模块;
(2)根据功能需求设计硬件电路,并查询资料绘制PCB板;
(3)查阅STM32开发相关资料,设计基本功能模块的控制程序;
(4)样机的实验与调试。
1.4 论文章节安排
本文各章节主要安排如下:
第1章主要介绍的擦玻璃机器人的课题背景以及国内外的研究状况,阐明擦玻璃机器人控制系统研究的重要性。
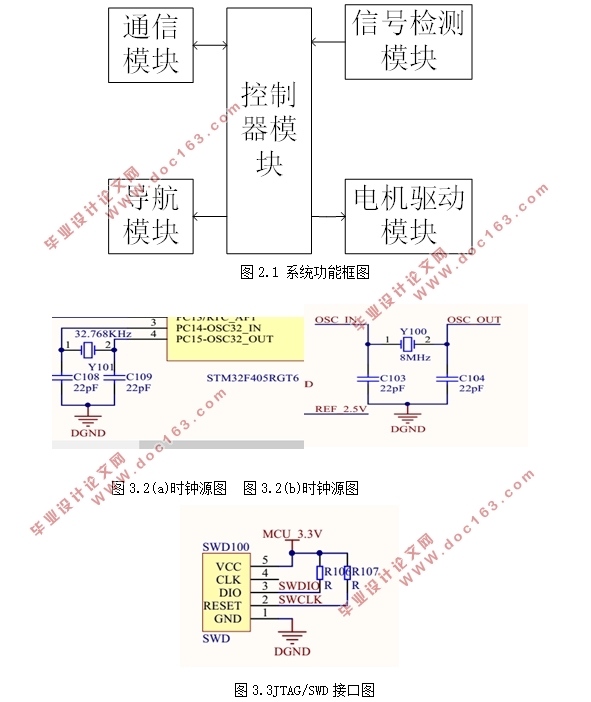
第2章首先分析对控制系统进行功能分析,并基于此分析进行系统总体设计方案进行选择,确定选型方案和技术方案。
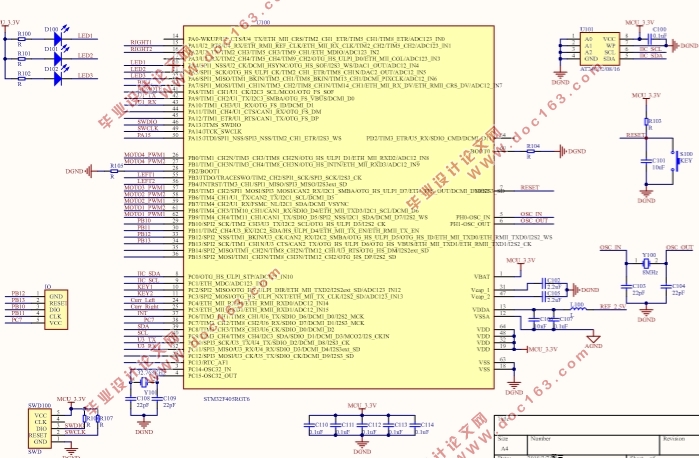
第3章主要根据第2章的方案来设计硬件电路,包括控制器最小系统,电机驱动电路等等。
第4章根据功能分析来进行相关模块的程序设计,实现具体的控制。
第5章在第3章和第4章的基础之上,进行程序的调试以及实物的调试,验证该控制系统的可行性。
第6章对本次设计进行总结,并基于最后的控制效果提出了下一步有待解决的一些问题。
[资料来源:http://Doc163.com]
[资料来源:https://www.doc163.com]

[资料来源:Doc163.com]
目录
第1章 绪论 1
1.1 课题背景 1
1.2国内外擦玻璃机器人的研究现状 1
1.3课题的主要任务 2
1.4 论文章节安排 2
第2章 功能分析以及总体方案选择 4
2.1控制系统功能分析 4
2.2系统总体方案选择 4
2.2.1 控制器模块技术方案 4
2.2.2 电机驱动模块技术方案 5
2.2.3 通信模块技术方案 6
2.2.4 信号检测模块技术方案 7
第3章 硬件电路设计 8
3.1引言 8
3.2 最小系统电路设计 8
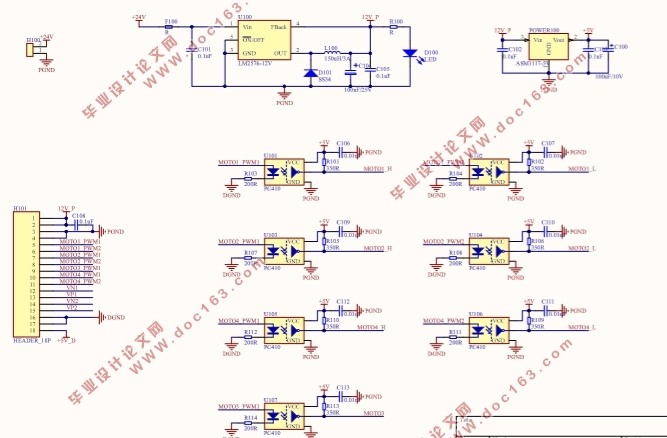
3.3 电机驱动电路设计 10
3.3.1 耦合电路设计 10
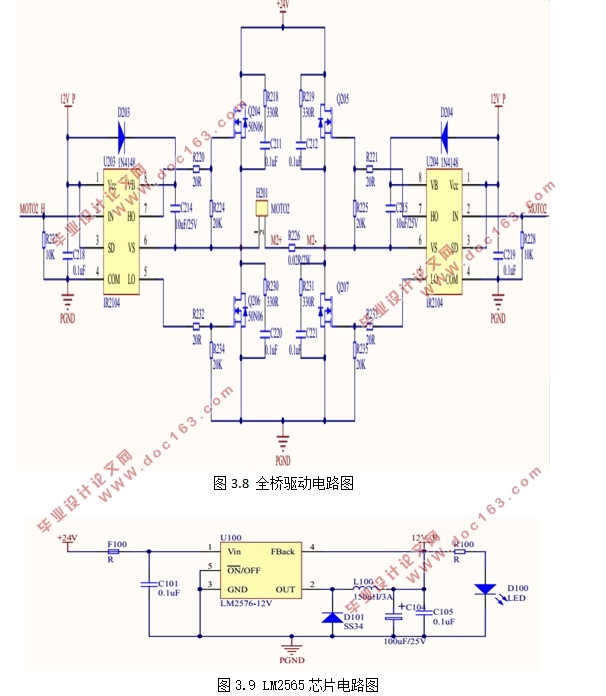
3.3.2 驱动电路设计 11
3.3.3 电压转换电路 12
3.4 导航模块电路 13
3.5 电流检测电路 13
3.6 蓝牙通信电路 15
第4章 软件设计 16
4.1功能分析 16
4.2 程序设计 17
4.2.1主函数设计 17
4.2.2 PWM程序设计 17
4.2.3 ADC程序设计 19
4.2.4 MPU6050程序设计 20
4.2.5蓝牙程序设计 21
4.2.6 电流检测函数设计 22
第5章 控制系统调试 23
5.1 PCB板的焊接 23
5.2 程序开发 25
5.3 机器人运行试验 27
5.4 总结 29
第6章 总结与展望 30
参考文献 31
附录 电流检测函数程序 32
致谢 38 [资料来源:http://www.doc163.com]