
基于伪逆的反复学习控制

资料介绍:
基于伪逆的反复学习控制(中文4700字,英文PDF)
Jayati Ghosh and Brad Paden
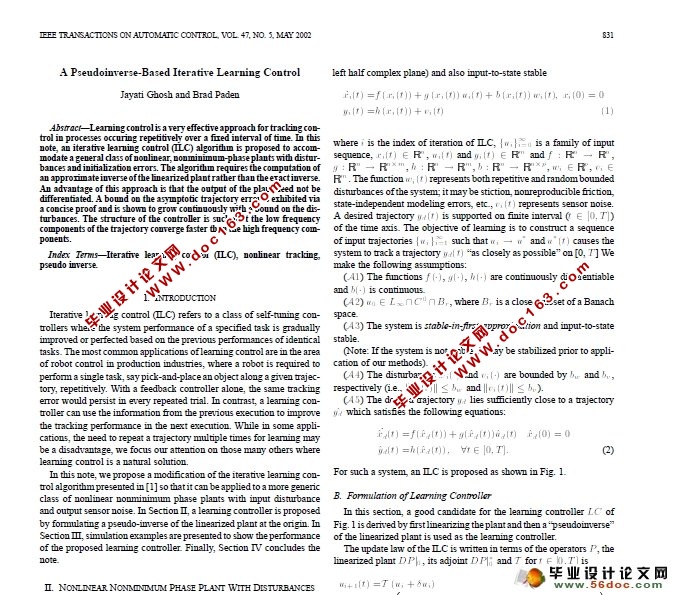
摘要——学习控制是用于一固定时间间隔内重复作用的跟踪控制的有效方法。本文给出一种反复学习控制算法,适用于一些具有扰动和初始误差的非线性非最小相位对象。该算法要求对一线性对象的近似转换而非精确转换。这种方法的一个优点是不需区分对象的输出。渐进轨迹误差的范围通过一精确的试验列出,并且可以看到其随着扰动范围持续的增大。该控制器的结构是这样的,其低频部分的轨迹汇合要比高频部分快。
索引术语——反复学习控制,非线性跟踪,伪逆。
[资料来源:Doc163.com]
[资料来源:Doc163.com]