
污水处理的全自动加药系统的设计

摘 要
众所周知水资源是人类生存与发展最宝贵的自然资源,然而随着经济发展和人口的增加,城市面积的扩大,带来了城市用水量和生活废水量的不断增多,从而使城市水资源的供需矛盾日益突出,水成为城市发展的最大制约因素。得在水资源非常宝贵的今天,污水处理和回用异常重要。据本人调查得出在目前国内外的各种污水处理方案中,絮凝剂、助凝剂的使用是其中必不可少的一种辅助措施,这样用于溶解及投加这种物质的设备在污水处理工程中的应用在国内外都非常的普遍。
资料显示在以前的污水处理中,活药装置大多是用人工来控制的。然而这种方式存在很多问题,比如药剂用量的不准确,控制缺少及时性等,而这都会影响到污水水质的处理结果,而且对于几万元一吨造价昂贵的高分子絮凝剂来期非科学性的用量造成的资金损失也是非常可观的。
所以本文根据污水处理工程中的实际出现的问题,提供了一种全自动加药系统。文中本人通过对在搅拌过程中容易产生振动和偏摆的搅拌轴和搅拌浆叶,用有限元法进行子分析,确定了搅拌轴的临界转速,校核了搅拌桨叶的强度;并通过分析核算给出整个系统中其它主要设备的设计说明。
本系统的主要优点为:
1)通过液位计来控制药罐内的液面高度,使得在加药系统全自动运行时,药液浓度恒定。 [资料来源:Doc163.com]
2)储药罐的容积设计合理,既能满足溶药罐每2个小时为周期的排药储存,又能满足用药计量泵连续向絮凝剂供药的流量要求。
3)通过搅拌机的搅拌,使得絮凝剂充分的溶解使药性达到最优,同时也避免了絮凝剂的溶解不均;具有加热性能的料仓结构,避免了干粉絮凝剂受潮结块;
4)利用可调转速的螺旋供料器保证可调的加药量,根据现场情况确定有效的药液浓度;
5)加药设备可以连续工作,安全可靠,稳定。
通过本文的论述本人希望找到一种实用价值更高,应用前景更广阔的加药产品,从而达到环境效益与经济效益的统一。同时这样的研究也是对深入学习和实践科学发展观的一种响应。
关键词:污水处理的全自动加药装置;絮凝剂搅拌;自动控制系统
Abstract
It is know to all,Water is the survival and development of mankind's most valuable natural resources, while with the economic development and the population explosion .And the cities size expanding .The use of water in the city is increased and the wastewater constantly increased too, city is water supply and the demand become more prominent, Water has become the largest development constraints to the city。Nowadays water resources are becoming more and more precious. So sewage disposal and recycling become the worldwide major issues. From my serve most of the sewage disposal techniques is the use of flocculating agent and coagulation-supporting agent is an auxiliary measure that is absolutely necessary. therefore the use of the equipment for dissolving and feeding such agent in the process of sewage disposal is quite common in the worldwide.
[资料来源:http://doc163.com]
From my serve the usual sewage disposal techniques, mostly their agent-feeding devices are controlled by people . With such controlling method there exist lot of promble.for example the inaccuracy of the quantity of the agent, lack of timely response etc. Those problems directly affect the quality of sewage disposal. Moreover, as the price of macromolecule flocculating agent is extremely high, the financial losses caused by the inaccuracy of the quantity of the agent to be added are highly considerable.
From the practical problem which is operation in sewage disposal, so I hope to provides a completely automatic agent-feeding system. In the article i through the mixing axle and the oar-shaped vane are apt to vibrate and sway during the mixing process. to work out this problem, the finity block was used to determine the critical speed of the mixing axle, and the strength of the oar-shaped vane was examined. By analysis the design specifications of the other equipment of the whole system .
The main advanced points of this system:
1) By equipped with level indicators. We can easy to know the liquid level in the tanks. Also when the operation is completely automatic, the density of the agent is constant.
2)The design of the storage tank's volume is reasonable. It can meet both the requirement for the dissolution tank to let off the agent every two hours, and the flow requirement for the measuring pump to feed the flocculating device continuously.
3) with the help of the mixing in the mixing machine, a unique technique of agent soakage is achieved. The PAM can achive a high drgree. Also it can make the uneven dissolution of the flocculating agent is avoided. By use the heating depository can prevent the dry flocculating agent from agglomeration due to damp.
4) The rotate speed of the spiral feeder is fitable. To make sure, the quantity of the agent can be adjusted according to the worksite conditions, the effective density of the agent is ensured;
5)The controlling system can continuous work, safe and reliable also it is stable. [资料来源:http://www.doc163.com]
Key Words:sewage disposal completely automatic agent-feeding; finity block mixing; Automatic system.
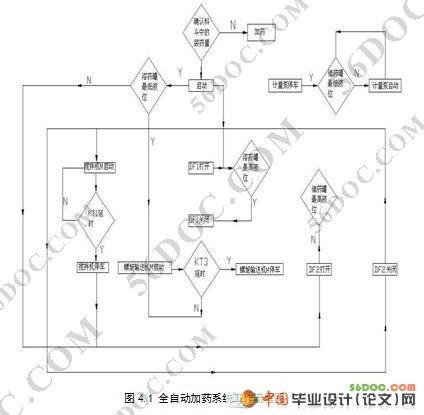
本系统在正常运行时,需要达到以下的控制要求:
第一本控制系统可以实现手动调节和自动运行的功能。
第二为了确保药液的充分的均匀本人使搅拌机的运行时间设为2 , 2 后搅拌机将停止搅拌,并从溶药罐内向外排放药液。
第三为了防止进水口中出现粘堵和返潮现象所以必须保证螺旋送料器和进水电磁阀同步启动。
第四当溶药罐在最低的液位时进水电磁阀将打开加水,而当溶药罐在最高的液位时进水电磁阀将关闭它的加水完成。
第五当搅拌机停车后且储药罐也不是最高的液位且溶药罐也不是最低的液位时进药的电磁阀将打开,溶药罐将向储药罐排药;而当溶药罐达到最低的液位且储药罐也达到最高的液位时,则进药的电磁阀关闭,停止排药。
第六当各电机出现故障时,可以通过报警信号来报警,并且能够实现自动停机,从而可以防止出现更大的事故。
第七为了确保运行过程的连续性和可靠性。
 [来源:http://www.doc163.com]
[来源:http://www.doc163.com] 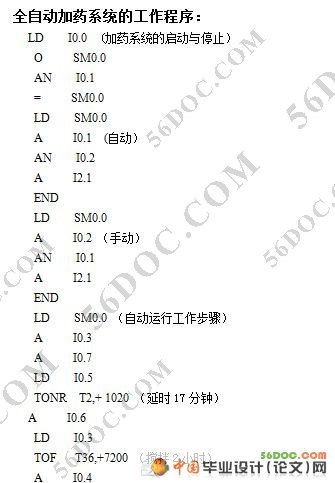
目 录 32000字
第1章 关于污水处理的综述.....................﹙1﹚
第1.1节 本课题研究的意义............................﹙1﹚
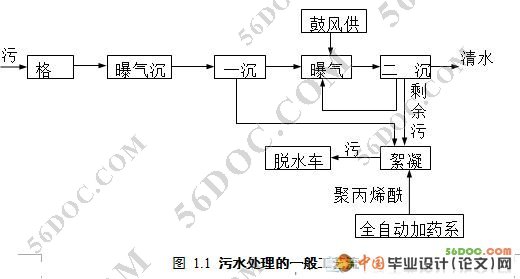
第1.2节 污水处理的一般工艺流程......................﹙4﹚
第1.3节 污水处理过程中使用的加药系统的国内外现状.....﹙5﹚
第1.4节 本课题的主要研究的目的和内容................﹙8﹚
第2章 全自动加药系统的工艺及控制要求.......﹙11﹚
第2.1节 污水中污泥的产生原因.......................﹙11﹚
第2.2节 污水中污泥的处理...........................﹙13﹚
第2.3节 污水处理中关于絮凝剂的使用.................﹙14﹚
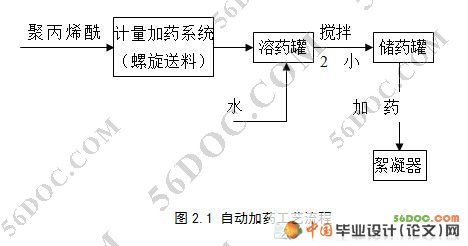
第2.4节 全自动加药系统的工艺流程...................﹙16﹚
第2.5节 控制要求...................................﹙17﹚ [版权所有:http://DOC163.com]
第3章 污水处理的全自动加药系统的主要设备的设计 ….﹙19﹚
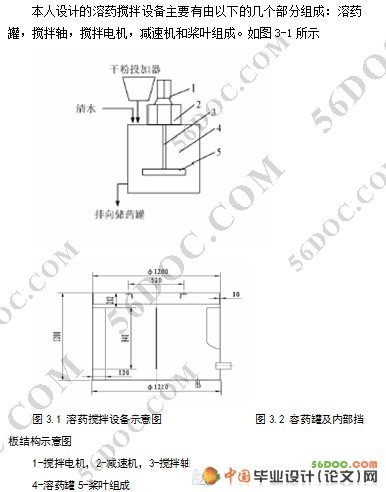
第3.1节 絮凝剂浸润系统的总体构成...................﹙19﹚
第3.2节 搅拌轴设计..................................﹙21)
第3.2.1节 强度计算..................................﹙21)
第3.2.2节 搅拌轴刚度校核............................﹙23)
第3.2.3节 临界转速校核..............................﹙24)
第3.3节 搅拌器的设计................................﹙25)
第3.3.1节 特性与结构................................﹙25)
第3.3.2节 确定搅拌器功率N...........................﹙26)
第3.3.3节 强度计算..................................﹙27)
第3.4节 电动机功率..................................﹙29)
第3.5节 搅拌罐的设计................................﹙30)
第3.6节 搅拌附件的设计..............................﹙32)
第3.7节 计量加药装置的设计..........................﹙32)
第3.7.1节 计量加药装置的结构设计....................﹙32)
第3.7.2节 螺旋设计..................................﹙33)
第3.8节 加热料仓设计................................﹙38)
第3.9节 给水加料系统................................﹙40)
第4章 自动化控制系统的设计………………………﹙42)
第4.1节 工作过程....................................﹙42)
第4.2节 设计方案....................................﹙46)
第4.2.1节 系统硬件设计..............................﹙46)
第4.2.2 系统PLC的选择...............................﹙46﹚
第4.3节 主电路电器组件的选择........................﹙47)
第4.4节 操作面板的布置..............................﹙48)
第4.5节 系统软件设计................................﹙49)
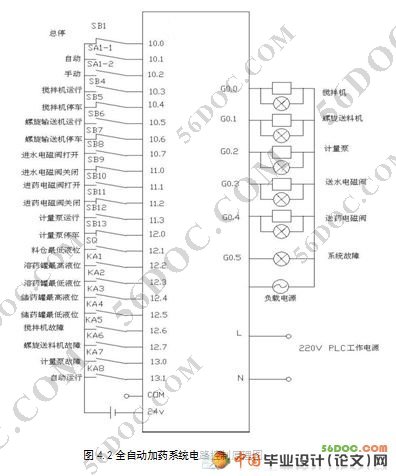
第4.5.1节 PLC的1/O分配表..........................﹙49)
第4.5.2节 电气控制设计..............................﹙50)
第5 章 总结与展望……………………………….….﹙56)
[来源:http://Doc163.com]
第5.1节 设备部分....................................﹙56)
第5.2节 控制系统....................................﹙58)
参考文献………………………………………﹙59)
附录……………………………………………﹙63)
翻译.......................................﹙65﹚
致谢…………………………………………………… ﹙76﹚