
仿生六足机器人机构的设计(含cad零件图和装配图)

仿生六足机器人机构的设计(含cad零件图和装配图)(选题审批表,任务书,开题报告,中期检查表,毕业论文16000字,cad图纸9张)
摘 要:论文简述了课题的背景及目的,对仿生学机器人做了简单介绍。本文通过对仿生六足机器人的步态规划的研究,确定了六足机器人的足的结构,采用 3 自由度分析了步态稳定性,实现六足机器人直线行走和转弯行走。总体设计包含了六足机器人的装配图和零件图的绘制,并对相关零件做了校验,确保机构设计的可行性。
关键词:仿生学;六足机器人;机构
Design of Bionic Hexapod Robot Mechanism
Abstract: The paper has summarized the background and the goal of its topic and has made the simple introduction of the bionic hexapod robot. Through the research of the motion of the six feet of the robot, This design has determined the foot structure,using the analysis of 3 degrees of freedom realizes the forward motion and turning motion of the robot . Picturing of the component and assembly mapping of the bionic hexapod robot as well as the inspection of related parts which ensures the feasibility of the machinery design are both included in the total design. [版权所有:http://DOC163.com]
Key words: bionics ;hexapod robot ;machinery
仿生六足机器人的研究方法与思路
本次研究的仿生机器人采用六足设计,而机构设计是仿生六足机器人本次的任务,也是仿生六足机器人系统设计的基础。整机机械结构、自由度数、驱动方式和传动机构等都会直接影响机器人的运动和动力性能。同时,仿生六足机器人机构的设计除了要满足系统的技术性能外,还要满足经济性能要求,即必须在满足机器人的预期技术指标的同时,考虑用材合理、制造安装便捷、价格低廉以及可靠性高等问题。
仿生六足机器人的机构由躯体和腿两部分组成,腿的数量及其配置是整体设计的主要问题。现有多组机器人的足数包括三足、四足、六足、八足甚至更多,足的数目较多时适合重载和慢速运动,而足数少时似乎运动更加灵活。足数选择的因素主要有:稳定性、节能性、冗余性、关节控制性能的要求、制造成本、质量、所需传感器的复杂性以及可能的步态等;腿的配置是指步行机器人的足相对于机体的位置和方位的安排,确定分布形式时,还需考虑一些细节问题,如腿在主平面内的几何构形和腿杆件的相对弯曲方向等。
[资料来源:Doc163.com]
[来源:http://www.doc163.com]
目 录
摘要……………………………………………………………………………………1
关键词…………………………………………………………………………………1
1 前言 ………………………………………………………………………………1
1.1 课题背景及目的 …………………………………………………………1
1.2 仿生机器人研究现状及发展趋势 ………………………………………2
1.3 仿生学原理分析 …………………………………………………………4
1.4 仿生六足机器人的研究方法与思路 ……………………………………4
2 整体设计方案 ……………………………………………………………………5
2.1 工作原理分析 ……………………………………………………………5
2.1.1 三角步态原理分析 ………………………………………………6 [来源:http://Doc163.com]
2.1.2 机器人走动步态分析 ……………………………………………6
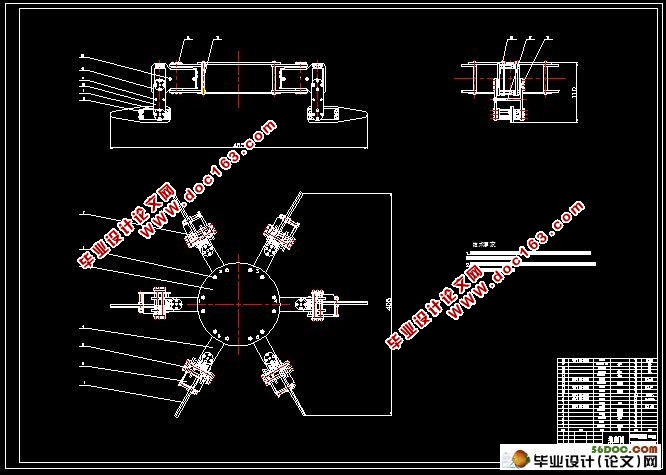
2.2 机器人机构的整体设计 …………………………………………………7
2.3 电机的选择 ………………………………………………………………9
2.4 舵机驱动原理与控制方法………………………………………………12
2.4.1 舵机原理 …………………………………………………………12 [版权所有:http://DOC163.com]
2.4.2 舵机控制方法 ……………………………………………………12
3 零件的设计………………………………………………………………………13
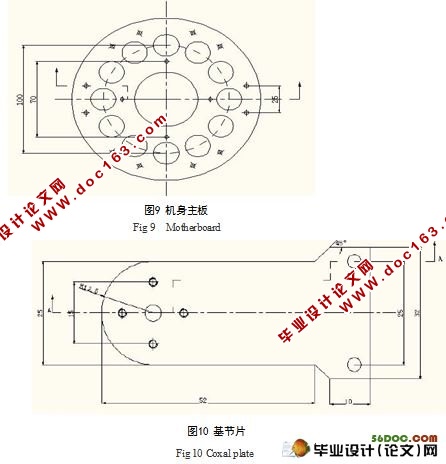
3.1 躯干的设计………………………………………………………………13
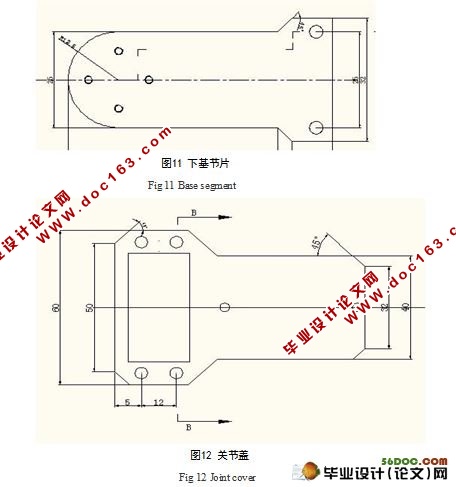
3.2 基节的设计………………………………………………………………14
3.3 关节盖的设计……………………………………………………………15 [资料来源:Doc163.com]
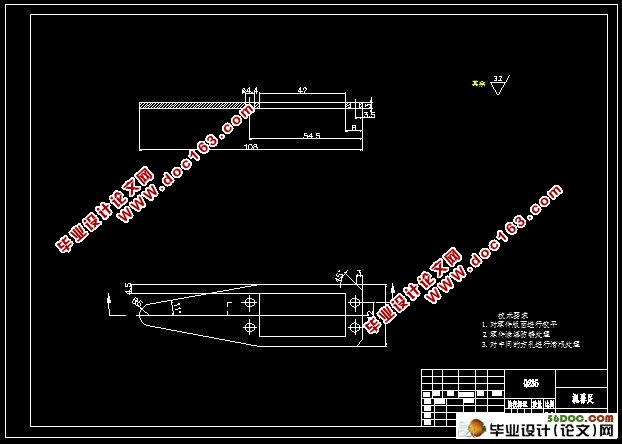
3.4 胫节片的设计……………………………………………………………16
3.5 足的设计…………………………………………………………………17
3.6 连接杆的设计……………………………………………………………17
3.7 固定片的设计……………………………………………………………18
4 总结………………………………………………………………………………19 [资料来源:http://Doc163.com]
参考文献 ……………………………………………………………………………19
致谢 …………………………………………………………………………………20
上一篇:三面翻广告牌传动系统设计