
机器人履带行走系统设计(含CAD零件装配图)
机器人履带行走系统设计(含CAD零件装配图)(任务书,开题报告,外文翻译,设计说明书12400字,CAD图9张)
摘 要
机器人技术在如今的应用中越来越广泛,其中集营救于一体的救援机器人又是研究中的新方向。典型的机器人由行走系统、作业系统、驱动系统、运动传感与控制系统等组成。机器人行走系统的选择关乎到整个机器人的运动,是机器人完成设定任务的基础。行走系统设计如今主要有轮式移动和履带式行走。履带式行走系统在较恶劣环境下具有更优异的表现。履带接触面积大,接地比压小,动力强劲,克服障碍性能好等优势。
通过对不同机构特点的研究,对关节式履带机器人进行分析论证。此类机器人在不同环境中通过改变关节的位置关系通过障碍。论文主要讨论了此类机器人的结构设计,控制原理并对机器人越野机动性能进行分析。在结构设计中,先对行走机构转向进行了物理分析,加入了双流向机构使得转弯更加平稳,灵活。在特定物理条件下,对机器人主轴,齿轮等主要零部件进行尺寸设计,初步得到机器人结构参数。在控制系统设计中,考虑到履带式机器人的工作环境,利用PC机无线通讯控制单片机,单片机控制相应步进电机完成指定动作。与此同时PC机可以接受单片机的反馈调节行走机构的姿态。最终本文还对机器人的各项性能指标进行了分析,主要针对沟壑跨越,爬坡行驶和阶梯翻越三种特殊环境进行研究。根据运动中重心变化等指标,增大履带臂与机体的距离,对机构尺寸给出了最优设计方案。 [资料来源:http://Doc163.com]
最后对机器人未来发展进行展望,未来世界一定会因为科技的进步,机器人技术的发展而更加美好。
关键词:机器人技术;履带行走系统;性能指标
1.3主要研究方向
1.3.1履带式行走系统内部结构研究
初步设计的关节式履带行走机构是利用步进电机驱动,该机构包含运动履带和臂履带。两履带用关节连接。而关节可以不断调整姿态以适应不同环境障碍。机器人这种关节式设计可以基本满足大多数运动要求。当然,设计中也存在不足,首先,履带式行走机构在转向时速度较高一侧会出现滑转现象而速度较低一侧会产生滑移。转向时,内外侧履带的实际速度与理论的速度不同,这样还会带来转向半径与转向角度的变化。由于车辆转向还会引起功率增大,当然这与地面路况和机器人接够有直接关系。另一方面,由于长期使用导致履带形变,破坏,磨损。最终使得机器人在直线行驶时两履带速度不一致。这种现象称为自偏驶现象。为解决这类缺陷,我们在将双流转向机构应用在行驶传动系统中。这种机构将动力分为变速分路与转向分路,功率整合后加载到驱动轮。次机构不仅平衡两侧功率流提高了功率效率还消除了因为电机而造成的偏驶误差。设计中,我们安放了转向电机,用来满足转向时功率增大的需求。 [资料来源:https://www.doc163.com]
1.3.2行走系统控制设计
机器人控制系统核心就是单片机,这次选用一个主单片机和四个从单片机。从单片机是用来控制步进电机的,单片机控制步进电机完成相应的行走动作。这四个电机分别为行驶驱动电机和转向电机以及两个关节驱动电机。单片机作为控制的核心,十分重要。因此,要合理调试单片机与电机之间的配合,使得电机能理想驱动机器人完成相应动作。
1.3.3行走系统越障分析
本文对所设计的履带行走机器人实用稳定性进行研究。在相应数学及物理模型下,通过计算得到相关运行数据,分别对机器人稳定性和相应的越障可行性进行分析。得到相应的理想设计数据。经过分析,在设计方案基础上获得最优方案。
工作内容与需要提供的基础资料
(1)工作内容
(a)履带式行走系统机构与机械结构设计;
(b)履带式行走系统控制方案设计;
(c)履带式行走救援机器人越野与机动性能分析;
(d)履带式行走救援机器人静态稳定性分析与负载能力分析。
(2)基本传动方案
以能穿越复杂环境(如台阶、楼梯、斜坡、壕沟、障碍等)到达指定场所实施多种救援任务为目标,构建救援机器人履带式行走系统实现方案。 [版权所有:http://DOC163.com]
(3)原始条件及数据
(a)最大进退速度:20m/min;
(b)最大行进坡度角:25°;
(c)最大越障高度:100mm;
(d)最大跨越宽度:150mm;
(e)最小转弯半径:600mm;
(f)最大负载能力:15kg;
(g)最大外形尺寸:700mm(长)×300mm(宽)×300mm(高)。
[资料来源:http://doc163.com]


目 录
摘 要 I
Abstract II
[来源:http://www.doc163.com]
第一章 绪论 1
1.1 选题背景与意义 1
1.1.1 选题背景 1
1.1.2 各类行走机构特点 1
1.2履带式移动机器人的研究现状 2
1.3主要研究方向 3
1.3.1履带式行走系统内部结构研究 3
1.3.2行走系统控制设计 4
1.3.3行走系统越障分析 4
第二章 机器人结构设计 5
2.1简介 5
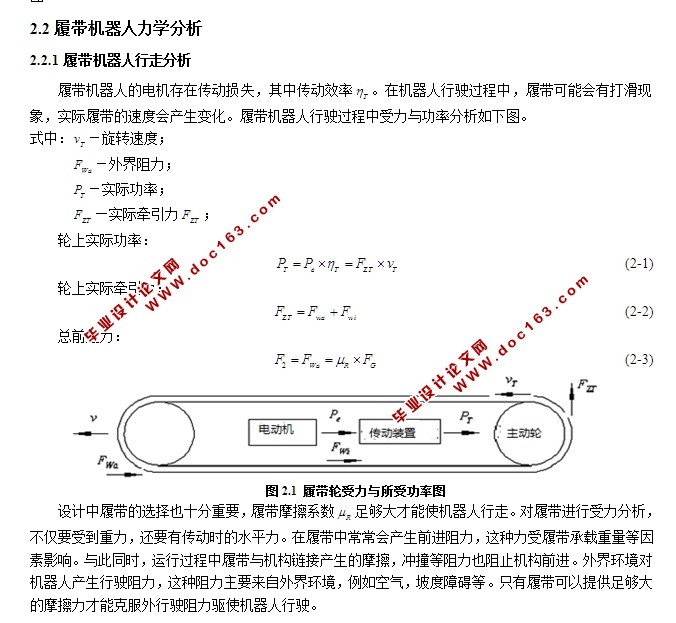
2.2履带机器人力学分析 5
2.2.1履带机器人行走分析 5
2.2.2机构转向原理 5
2.3传动结构 9
2.3.1履带式行走机构 9
2.3.2履带机器人关节方案设计 12
2.4基本结构设计 12
2.4.1轴类零件参数尺寸 12
2.4.2剩余部件设计 13
第三章 机器人控制系统 15
3.1 简述 15
3.2 控制系统选取 15
3.2.1 主要原件选取 15
3.2.2 控制原理设计 15
第四章 越野机动性能分析 17
4.1 概述 17
4.2履带机器人稳定性分析 17
4.3.1 沟壑跨越 18
4.3.2 爬坡行驶 18
4.3.3 台阶翻越 19
第五章 结论与展望 21
5.1结论 21
5.2展望 21
致 谢 22
参考文献 23
上一篇:FMS自动化立体仓库堆垛起重机机械结构设计(含CAD零件装配图)
下一篇:3090型直线振动筛结构设计(含CAD,CAXA图零件装配图,UG三维图)★