ЛљгкМЄЙтТіГхВтОрЕФПѓджЛњЦїШЫБмеЯЯЕЭГЩшМЦ(ВтПиММЪѕгывЧЦї)

1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.НіЙЉбЇЯАВЮПМжЎгУ.
Ум Лн БЃ АяжњжааФ
ЛљгкМЄЙтТіГхВтОрЕФПѓджЛњЦїШЫБмеЯЯЕЭГЩшМЦ(ВтПиММЪѕгывЧЦї)(34000зж)
еЊ вЊ
УКПѓОШджЛњЦїШЫЪЧвЛжжФмЙЛдкУКПѓОЎЯТджКІЛЗОГвЃПиЛђзджїЕМКНЙЄзїЕФЛњЦїШЫЃЌЫћФмЙЛажњЛђепДњЬцОШЛЄШЫдБНјШыЪмджПѓОЎФкВПНјааЛЗОГЬНВтКЭОШдЎЃЌПЩвдМЋДѓЕиМѕЩйКЭБмУтОШЛЄШЫдБЕФЩЫЭіЁЃЛњЦїШЫЩюШыПѓОЎФкВПЃЌгІЕБОпгаОжВПздБмеЯФмСІЃЌЖјЛњЦїШЫвЊЯыЪЕЯжзджїБмеЯЃЌЪзЯШОЭЪЧвЊзМШЗЕиЪЖБ№ГіеЯАЮяаХЯЂЃЌВЂЧвФмЖдЛњЦїШЫгыеЯАЮяжЎМфОрРыНјааЪЕЪБВтСПЁЃ
ЮЊНтОівдЩЯДцдкЮЪЬтЃЌТлЮФЪзЯШзёбЛљгкааЮЊЕФЛњЦїШЫЩшМЦЫМТЗЃЌбЁгУКЯЪЪЕФДЋИаЦї----МЄЙтТіГхВтОрвЧЃЌРћгУМЄЙтТіГхВтОрвЧЕФдРэЖджмЮЇЕФеЯАЮяаХЯЂНјааЪЕЪБМрВтЃЌЦфДЮЃЌеыЖдУКПѓОШдЎЛњЦїШЫБмеЯвЊЧѓЩшМЦСЫШЋЗНЮЛЛњаЕзЊЖЏдЦЬЈЃЌВЂНЋВтСПЗЖЮЇДгЖўЮЌРЉеЙЕНШ§ЮЌЃЌдйДЮЃЌЯъЯИЩшМЦСЫУКПѓОШджЛњЦїШЫБмеЯПижЦЯЕЭГЕФгВМўЕчТЗЃЌАќРЈМЄЙтЗЂЩфЕчТЗЁЂМЄЙтНгЪеЕчТЗЁЂЪ§ОнВЩМЏЕЅдЊЕчТЗЁЂдЫЖЏПижЦЕЅдЊЕчТЗЕШЁЃ
зюКѓЃЌЖдбажЦЕФУКПѓОШджЛњЦїШЫМЄЙтВтОрБмеЯЯЕЭГНјааСЫЪЕЪБЖЏЬЌВтСПеЯАЮяОрРыКЭВЛЭЌВФжЪеЯАЮяЕФВтОрЮШЖЈадЪЕбщЃЌНсЙћжЄУїСЫБОЮФЩшМЦЕФЕчТЗЯЕЭГКЭШэМўЯЕЭГЕФгааЇадКЭПЩааадЁЃ
ЙиМќДЪЃКУКПѓОШджЛњЦїШЫ ЃЛзджїБмеЯ ЃЛеЯАЮяВтСП ЃЛМЄЙтВтОр
ABSTRACT [зЪСЯРДдДЃКwww.doc163.com]
Coal mine rescue robot is one kind of robots used in underground destroyed coal mine. It could help even replace human beings to detect the mine’s environment and rescue, and greatly reduce and avoid the casualties. Consequently, In order to enter into the mine and explore the environment, vision based navigation is the basic technology. This thesis aims at the study and design of the binocular stereo vision for the obstacle recognition and measuring.
To solve the above problems, Firstly, the robot based on behavior follows design ideas, choose appropriate sensor, laser pulse laser rangefinder, using the principle of pulsed rangefinder surrounding obstacles information monitoring. Secondly, according to mine rescue robot obstacle avoidance requirements we design a mechanical rotating yenta .Then expand the measurement range from 2d to 3d. Thirdly, hardware circuit of robot obstacle avoidance control system is designed in detail, such as laser emission circuit, laser receiving circuit, data acquisition unit circuit, motion control unit circuit and so on.
Finally, on the development of the mine rescue robot obstacle avoidance system for laser distance measuring real-time dynamic measurement of the distance and obstacles of different materials ranging obstacles stability test, and the experiment results proved that this design of circuit systems and software systems effective and feasible.
Keywords: Obstacle Measuring; Coal mine rescue Robot; Autonomous obstacle avoidance; Laser rangefinder
ЙтТіГхЪНВтОрвЧЛљБОНсЙЙ
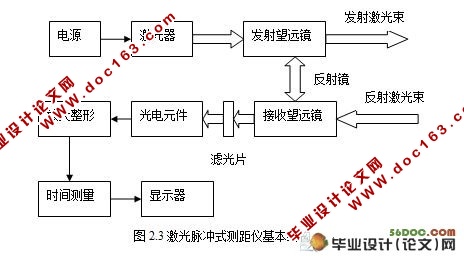
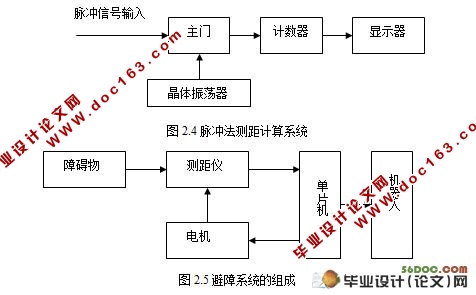
ЕБВтОрвЧеезМФПБъКѓЃЌДђПЊМЄЙтЕчдДЃЌМЄЙтЦїОЭЗЂГівЛИіКмеЕФЙтТіГхЃЌетИіЙтТіГхОЙ§ЗЂЩфЕЅдЊКѓЃЌбЙЫѕСЫЫќЕФЗЂЩЂНЧЁЃвдКьБІЪЏМЄЙтЦїЮЊР§ЃЌЦфЗЂЩфНЧвЛАуЪЧМИИіКСЛЁЖШЃЌОЙ§ЗЂЩфЕЅдЊКѓЗЂЩЂНЧдМбЙЫѕЮЊСуЕуМИИіКСЛЁЖШЁЃдкЙтТіГхЗЂЩфГіШЅЕФЭЌЪБЃЌЦфжаМЋаЁвЛВПЗжЙтСЂМДЭЈЙ§СНПщЗДЩфОЕЖјжБНгНјШыНгЪеЕЅдЊвдДЫзїЮЊЗЂЩфВЮПМаХКХЃЌгУЦфзїЮЊБъЖЈМЄЙтЗЂГіЕФЪБМфЁЃВЮПМаХКХНјШыНгЪеЕЅдЊКѓЃЌОЙ§ТЧЙтЦЌЕНДяЙтЕчзЊЛЛЦїЃЈгЩЙтЕчЖўМЋЙмЛђЙтЕчБЖдіЙмЕШЙтЕчдЊМўзщГЩЃЉЃЌЪЙЙтаХКХБфЮЊЕчаХКХЃЌМДНЋЙтТіГхБфЮЊЕчТіГхЃЌетИіЕчТіГхОЗХДѓећаЮКѓЫЭжСЪБМфВтСПЯЕЭГЃЌЪЙЦїПЊЪММЦЪБЁЃЖјЩфЯђФПБъЕФЙтТіГхЃЌгЩгкФПБъЕФЗДЩфЃЈЛђТўЗДЩфЃЉзїгУЃЌЪЙЙтЃЈЛђВПЗжЙтЃЉДгдТЗЗДЩфЛиРДГЩЮЊВтОраХКХЃЌНјШыНгЪеЕЅдЊЃЌдйОЙ§ТЧЙтЦЌЁЂЙтЕчзЊЛЛЦїЁЂЗХДѓећаЮЕчТЗЖјНјШыЪБМфВтСПЯЕЭГЃЌЪЙЦфЭЃжЙМЦЪБЁЃЪБМфВтСПЯЕЭГЫљМЧТМЕФЪБМфЃЈМДВЮПМаХКХгыВтОраХКХНјШыЪБМфВтСПЯЕЭГЕФЪБМфВюЃЉЃЌгЩЯдЪОЦїЯдЪОГіРДЃЌНјЖјЭЈЙ§выТыКѓдкЯдЪОЦїЩЯжБНгИјГіВтОрвЧЕНФПБъЕФОрРыЁЃ [зЪСЯРДдДЃКhttp://www.doc163.com]
МЄЙтТіГхВтОрвЧМАЦфВЮЪ§
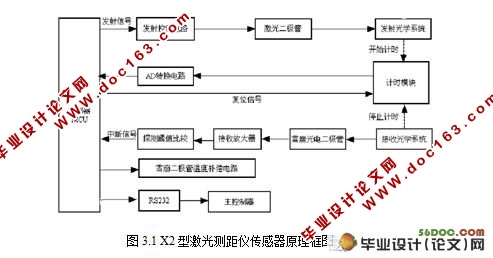
БОЯЕЭГЩшМЦвЊЧѓЕФЙЄзїЛЗОГЖЈЮЛЮЊПѓЯТЃЌгЩгкПѓЯТЛЗОГЖёСгЃЌЙтЯпЕЭАЕЃЌЛвГОЖрЃЌЪЊЖШЁЂЮТЖШВЈЖЏЗЖЮЇКмДѓЁЃдкФмМћЖШНЯВюКЭСЌајзївЕЪБЖдЯЕЭГЕФвЊЧѓНЯИпЃЌбЁдёКЯЪЪЕФДЋИаЦїгШЮЊживЊЃЌПМТЧЕНЯЕЭГБиаыПЫЗўетаЉВЛРћЧщПіЃЌвђДЫЭЈЙ§ЖдБШЯжгаДЋИаЦїЕФадФмЃЌЯЕЭГбЁгУСЫШ№ЪПPREXISOЙЋЫОЕФX2аЭИпадФмЕФАыЕМЬхМЄЙтВтОрвЧЁЃИУжжМЄЙтВтОрвЧЛљгкТіГхМЄЙтВтСПЗНЗЈЩшМЦЃЌРћгУАыЕМЬхТіГхМЄЙтЙмзїЮЊЗЂЩфЙтдДНјааОрРыВтСПЃЌЪЧгІгУЕчзгЁЂЙтбЇЁЂМЄЙтММЪѕзМШЗВтСПОрРыЕФаТвЛДњЮЂаЁаЭМЄЙтВтОрвЧЃЌЫќОпгаВтСПЫйЖШПьЁЂЬхЛ§аЁЁЂадФмПЩППЕШгХЕуЃЌЭъШЋТњзуОШджЛњЦїШЫБмеЯЦїЯЕЭГЕФЪЙгУвЊЧѓЁЃ
X2аЭМЄЙтВтОрвЧЕФжївЊММЪѕВЮЪ§ЃК
ВтОрадФм
зюаЁОрРыЃК0.1m
зюДѓОрРыЃК30m
ВтСПОЋШЗЖШЃЈ ЃЉЃК0.002m
ЙтдДадФм
МЄЙтЖўМЋЙм ЃК620-690nm
беЩЋЃККьЩЋ
МЄЙтРраЭЃКЖўМЖМЄЙт
ЙтЪјЗЂЩЂЃК016×0.6mrad
ТіГхГжајЪБМфЃК s
зюДѓЗЂЩфЙІТЪЃК0.95mW
УПТіГхзюДѓЗЂЩфЙІТЪЃК8mW
МЄЙтЙтЪјЃЈМЄЙтЗДЩфЙтбЇЯЕЭГЗЂГіЕФЙтЪјЃЉ≤Φ40mm
жївЊЪЙгУадФм
ЙЉЕчЃК2×AAAЃЈжЛСє3VЃЉ
ЙЄзїЮТЖШЃКЃ0ЁцЁЋЃЋ50Ёц [РДдДЃКhttp://Doc163.com]
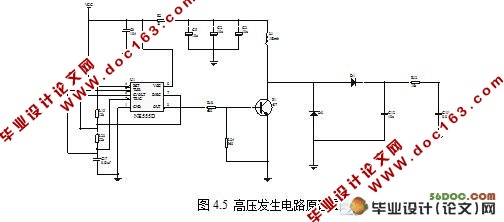
X2аЭМЄЙтТіГхВтОрвЧЕФМЄЙтВтОрДЋИаЦїВПЗжЕФдРэПђЭМШчЯТЭМЫљЪО,ЯЕЭГжївЊгаЗЂЩфЧ§ЖЏЕчТЗЁЂНгЪеЕчТЗЁЂМЦЪБЕчТЗЁЂЮТЖШВЙГЅЕчТЗКЭЙтбЇЯЕЭГЕШВПЗжзщГЩЁЃ
[РДдДЃКhttp://www.doc163.com]
 [АцШЈЫљгаЃКhttp://DOC163.com]
[АцШЈЫљгаЃКhttp://DOC163.com]