
ЬНВтЛњЦїШЫЯЕЭГЕФЩшМЦ(ЕчТЗЭМ+ЕчЦјЭМ+ГЬађ)Ёю

1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.НіЙЉбЇЯАВЮПМжЎгУ.
Ум Лн БЃ АяжњжааФ
еЊвЊ
БОЩшМЦВЩгУФЃПщЛЏЩшМЦЃЌвдБуИљОнвЊЧѓбЁдёКЭЖЈжЦХфжУЃЌВЂдкашвЊЕФЪБКђЗНБуИќЛЛКЭЬэМгЦфЫћФЃПщЃЌЖјЧвИјГіСЫСНжжвЦЖЏЗНЪНЕФЩшМЦЗНАИЃЌМДТФДјЪНвЦЖЏЗНЪНКЭТжЪНЕФЩшМЦЃЌСНепЖМгаИїздЕФЬиЕуЃЌЕЋжївЊвдбаОПЩшМЦТФДјЪНЮЊжїЃЌЫќОпгаСМКУЕФЛњЖЏадЃЌдкдНеЯЁЂПчЙЕЁЂХЪХРЗНУцОпгаУїЯдгХЪЦЁЃИУЛњЦїШЫЕФзюДѓгХЕуЪЧОпгаСМКУЕФдНеЯадФмЁЂЛЗОГЪЪгІадФмЁЂЗРЫЄПЙГхЛїадФмВЂОпБИШЋЕиаЮЭЈЙ§ФмСІЁЃЖјТжЪНЬНВтЛњЦїШЫдђЛњЖЏадФмБШНЯКУЁЃГ§СЫЩшМЦЬНВтЛњЦїШЫЕФзмЬхНсЙЙЭтЃЌЛЙИјГіСЫвЦЖЏПижЦЗНАИЁЃ
ЛњЦїШЫзюживЊЕФЛњЙЙЪЧдЫЖЏЕзХЬЕФЩшМЦЃЌМДЪЙШэМўЩшМЦЕФдйКУЃЌвЦЖЏЗНЪНУЛгаЩшМЦКУЃЌФЧУДЛњЦїШЫвВВЛЛсКмКУЕФжДааШЮЮёЁЃТжЪНЃЌЭШЪНЃЌТФДјЪНЕФвЦЖЏЗНЪНдкЩшМЦЙ§ГЬжавбОИјГіЃЌ
ПЩвдИљОнздМКЩшМЦЕФвЊЧѓНјаабЁдёШчЙћЕиаЮБШНЯЦНЛКЃЌЛђЪЧгаЙЕлжЕФЕиаЮЃЌПЩвдбЁдёТФДјЕФвЦЖЏЗНЪНЃЛШчЙћЪЧЦНЛКУЛгаЙЕлжЕФЕиаЮЃЌОЭбЁгУТжЪНЕФвЦЖЏЗНЪНЃЛШчЙћЕиаЮГЩНзЬнзДЃЌЖјЧвЕиаЮБШНЯИДдгЃЌзюКУбЁгУЭШЪНЕФЗНЗЈЁЃ
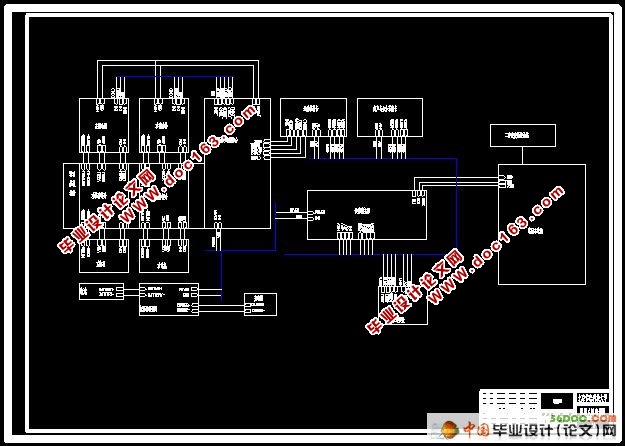
БОЩшМЦПЩвдВЩгУСНжжПижЦЯЕЭГЃЌМДЭЈЙ§ЩЯЮЛЛњжБНгЭЈЙ§змЯпЖдЛњЦїШЫНјааПижЦЛђЪЧЭЈЙ§ЮоЯпЕчЬЈЖдЛњЦїШЫНјааПижЦЁЃ
ЙиМќДЪЃК ЬНВтЛњЦїШЫЃЛ ФЃПщЛЏЩшМЦЃЛ ТФДјвЦЖЏЗНЪНЃЛ ЛњЦїШЫЕФПижЦЯЕЭГЃЛ
[зЪСЯРДдДЃКhttp://doc163.com]
Abstract
The design is modular in design so that in accordance with requirements of options and custom configuration, and when needed to facilitate the replacement and add other modules, and is given two mobile forms of design options, that is, tracked and wheeled mobile way of design , Both have their own characteristics, but mainly to crawler-based research and design, it has good mobility in the barrier, the inter-ditch, climbing has obvious advantages. The robot is the greatest advantage of the barrier has a good performance, adapt to environmental performance, Fangshuai impact resistance and have all-terrain capacity. The wheeled robot will detect mobility is betterЁЃIn addition to detecting robot design the overall structure, but also gives a mobile control waysЁЃ
Robot is the most important bodies of the sports chassis design, even the best software design, mobile design means no good, then the robot will not be very good mission. Wheeled, legged, tracked the movement of way in the design process has been given, Can be designed in accordance with the requirements of their own choice if the relatively flat terrain, or a gully of the terrain, can choose to track the movement; If the gully is not flat terrain, on the choice of wheeled mobile way, if formed ladder, and More complex terrain, the best choice legged approachЁЃ [зЪСЯРДдДЃКwww.doc163.com]
This design uses two types of control systems, through the PC directly through the bus to control the robot through the radio or to control the robotЁЃ
KeywordsЃК Detecting robot; modular designЃЛtracked mobileЃЛ robot's control systemЃЛ
жївЊФкШнЃК
1ЁЂбаОПЬНВтЛњЦїШЫЯЕЭГЕФЩшМЦддђЁЃ
2ЁЂШЗЖЈЬНВтЛњЦїШЫЕФвЦЖЏЗНЪНЃЌВЂЖдећИіЬНВтЛњЦїШЫЕФећЬхНјааЙцЛЎЩшМЦЁЃ
3ЁЂЖдЬНВтЛњЦїШЫЯЕЭГЕФгВМўЩшМЦЃЌЛцжЦЛњаЕЭМЁЃ
4ЁЂИјГівЦЖЏПижЦЯЕЭГЕФЩшМЦЗНАИЃЌЁЃ
ФПБъЃК
еЦЮеЬНВтЛњЦїШЫЯЕЭГЕФЩшМЦддђЃЌДгЪЕМЪгІгУЛЗОГГіЗЂШЗЖЈЛњЦїШЫЕФвЦЖЏЗНЪНЃЌбЁгУКЯРэЕФФПБъМрВтЪжЖЮЃЌРДЪЕЯжЬНВтФПЕФЃЌВЂзЋаДБЯвЕТлЮФЃЌДяЕНЛњЕчвЛЬхЛЏзлКЯФмСІбЕСЗЕФФПЕФЁЃ
БОЩшМЦЕФгХЕуЪЧВЩгУСЫФЃПщЛЏЩшМЦЗНАИЃЌПДЦ№РДЛњЙЙКмМђЕЅЃЌЕЋЙІФмЭЛГіЃЌВЂЧвСЊНгЗНЪНДѓЖМВЩгУТнЖЄЃЌТнЫЈЕФЗНЪНЃЌВ№зАБШНЯЗНБуЁЃШБЕуОЭЪЧЃЌВЩгУСЫТФДјЕФаазпЗНЪНЃЌЫфШЛвЦЖЏБШНЯЦНЮШЃЌЖјЧвПЩвддНеЯЃЌПчЙ§ЙЕлжЕШЁЃЕЋЛњЖЏадФмБШНЯВюЃЌЖјЧвЃЌгЩгкДѓСПВЩгУТнЖЄЃЌТнЫЈЕФСЌНгЃЌЫљвдвЛЖЈвЊОГЃНћЙЬТнЖЄЃЌТнФИЁЃ
дкЩшМЦЛњЦїШЫЕФЙ§ГЬжаЃЌгіЕНЕФзюДѓФбЕуОЭЪЧЛњЦїШЫЕФЭЈбЖдЫЖЏЙ§ГЬЃЌОЙ§ДѓСПЕФбЇЯАбЏЮЪЃЌЭЌбЇРЯЪІЕФАяжњЃЌБОШЫЛљБОеЦЮеСЫетИіЙ§ГЬЁЃЕЋЯИНкЮЪЬташвЊдквдКѓМЬајбЇЯАЁЃ [РДдДЃКhttp://www.doc163.com]
баОПФкШн
БОЩшМЦВЩгУФЃПщЛЏЩшМЦЃЌвдБуИљОнвЊЧѓбЁдёКЭЖЈжЦХфжУЃЌВЂдкашвЊЕФЪБКђЗНБуИќЛЛКЭЬэМгЦфЫћФЃПщЃЌЖјЧвИјГіСЫСНжжвЦЖЏЗНЪНЕФЩшМЦЗНАИЃЌМДТФДјЪНвЦЖЏЗНЪНКЭТжЪНЕФЩшМЦЃЌСНепЖМгаИїздЕФЬиЕуЃЌЕЋжївЊвдбаОПЩшМЦТФДјЪНЮЊжїЃЌЫќОпгаСМКУЕФЛњЖЏадЃЌдкдНеЯЁЂПчЙЕЁЂХЪХРЗНУцОпгаУїЯдгХЪЦЁЃИУЛњЦїШЫЕФзюДѓгХЕуЪЧОпгаСМКУЕФдНеЯадФмЁЂЛЗОГЪЪгІадФмЁЂЗРЫЄПЙГхЛїадФмВЂОпБИШЋЕиаЮЭЈЙ§ФмСІЁЃЖјТжЪНЬНВтЛњЦїШЫдђЛњЖЏадФмБШНЯКУЁЃГ§СЫЩшМЦЬНВтЛњЦїШЫЕФзмЬхНсЙЙЭтЃЌЛЙИјГіСЫвЦЖЏПижЦЗНАИЁЃ
ЦфОпЬхбаОПФкШнШчЯТЃК
1ЁЂ баОПЬНВтЛњЦїШЫЯЕЭГЕФЩшМЦддђЁЃ
вРОндЫЖЏбЇдРэЃЌЖдЛњЦїШЫНјааадФмжИБъЗжЮіЃЌЖЏЬЌЗжЮіЃЌЪЙЛњЦїШЫФмЙЛздЪЪгІТЗУцЃЌМДОпгаПЙЧуИВадЁЂХРЦТадФмЁЂдНеЯадФмЁЂПчЙЕадФмЕШЙІФмЁЃ
2ЁЂШЗЖЈЬНВтЛњЦїШЫЕФвЦЖЏЗНЪНЃЌВЂЖдећИіЬНВтЛњЦїШЫЕФећЬхНјааЙцЛЎЩшМЦЁЃ
1ЃЉвЦЖЏЗНЪНЕФШЗЖЈЃЛ
2ЃЉзмЬхНсЙЙЩшМЦЃЛ
3ЃЉДЋЖЏЯЕЭГЩшМЦЁЃ
3ЁЂИјГівЦЖЏПижЦЯЕЭГЕФЩшМЦЗНАИЁЃ
1ЃЉМрВтЗНЗЈЃЛ
2ЃЉМЦЫуЛњгВМўЯЕЭГЕФЩшМЦЃЛ
3ЃЉМЦЫуЛњШэМўЯЕЭГЕФЩшМЦЁЃ
ЛњаЕЯЕЭГЕФЩшМЦ
ЩшМЦЖдЬНВтЛњЦїШЫВЩгУСЫФЃПщЛЏЩшМЦЃЌзмЬхЗжЮЊЫФИіФЃПщЃЌМДМЦЫуЛњФЃПщЃЌДЋИаЦїФЃПщЃЌЕчдДМАЧ§ЖЏФЃПщЃЌдЫЖЏЕзХЬФЃПщЁЃФЃПщЛЏЩшМЦЕФЬНВтЛњЦїШЫНсЙЙБШНЯУїСЫЃЌЖјЧвдквЛаЉФЃПщдЄСєСЫвЛаЉПеМфЃЌПЩвддкашвЊЕФЪБКђИќЛЛЛђЬэМгЦфЫћФЃПщЁЃ [АцШЈЫљгаЃКhttp://DOC163.com]
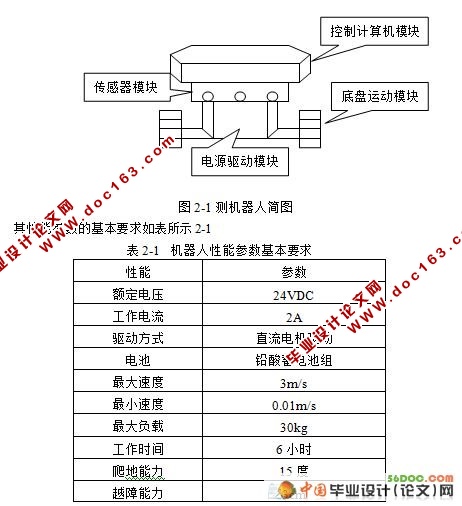
ЛњЦїШЫадФмВЮЪ§ЛљБОвЊЧѓ
адФм ВЮЪ§
ЖюЖЈЕчбЙ 24VDC
ЙЄзїЕчСї 2A
Ч§ЖЏЗНЪН жБСїЕчЛњЧ§ЖЏ
ЕчГи ЧІЫсаюЕчГизщ
зюДѓЫйЖШ 3m/s
зюаЁЫйЖШ 0.01m/s
зюДѓИКди 30kg
ЙЄзїЪБМф 6аЁЪБ
ХРЕиФмСІ 15ЖШ
дНеЯФмСІ 3cm
МЦЫуЛњФЃПщЕФЩшМЦ
МЦЫуЛњФЃПщЗжЮЊСНВПЗжНсЙЙЃЌЩЯЖЫЮЊЖШжЇГХМмЃЌЯТЖЫЪЧМЦЫуЛњЕФБЃЛЄМмЁЃЦфжажЇГХМмЪЧгУРДПижЦЩуЯёЭЗЕФМрВтЗНЯђЃЌНЋЩуЯёЭЗАВзАдкжЇГХМмЕФЬзЭВРяЃЌДЫЩшМЦЪЧЮЊМѕаЁЭтНчЛЗОГЖдЩуЯёЭЗБэУцКЭЯпТЗЕФгАЯьЃЌШчЫЎЃЌбєЙтЕФИЏЪДЕШЃЌЫфШЛВЛФмЭъШЋИєРыЭтНчЕФгАЯьЃЌЕЋОЁСПдіМгСЫЩуЯёЭЗЕФЪЙгУЪйУќЁЃдкжЇГХМмЕФгвЗНКЭЯТЗНАВзАСНИіЖцЛњЃЌЪЙЬзЭВОпгаЩЯЯТЃЌзѓгвСНИіздгЩЖШЃЌДгЖјЪЙЩуЯёЭЗПЩвдШЋЗНЮЛЕФМрВтжмЮЇЕФЛЗОГЁЃБЃЛЄМмЪЧгУРДЗРжЙМЦЫуЛњЪмЕНЭтНчЛЗОГЕФзВЛїЃЌСэЭтЃЌБЃЛЄМмЬсИпСЫЩуЯёЩшБИЕФИпЖШЃЌПЩвдПДЕФИќдЖвЛаЉЁЃ


[зЪСЯРДдДЃКhttp://Doc163.com]

ФП ТМ 15000зж
еЊвЊ ЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDI
AbstractЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDII
ЕквЛеТЁЁИХЪіЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЃД
1.1 ЛњЦїШЫЕФгІгУЗЖЮЇЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЃД
1.2 ЬНВтЛњЦїШЫЕФЯШзДМАЗЂеЙЧїЪЦЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЃД
1.3 баОПФкШнЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЃЕ
ЕкЖўеТЁЁЛњаЕЯЕЭГЕФЩшМЦЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЃЗ
2.1 МЦЫуЛњФЃПщЕФЩшМЦЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЃЗ
2.2ЁЁЁЁДЋИаЦїФЃПщЕФЩшМЦЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЃИ
2.3ЁЁЁЁЕчдДМАЧ§ЖЏФЃПщЕФЩшМЦЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЃИ
2.4ЁЁЁЁЕзХЬдЫЖЏФЃПщЕФЩшМЦЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЃИ
2.5ЁЁЁЁИїФЃПщЕФСЌНгЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD11
ЕкШ§еТЁЁФмдДЧ§ЖЏЕФЩшМЦбЁдёЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD14
3.1 ФмдДЕФЙЉИјЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD14
[РДдДЃКhttp://Doc163.com]
3.2ЁЁЁЁЕчЛњЕФбЁдёЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD14
3.3ЁЁЁЁЕчЛњЧ§ЖЏЕФбЁдёЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD15
ЕкЫФеТЁЁДЋИаЦїЯЕЭГЕФЩшМЦЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD17
4.1 ЪгОѕДЋИаЦїЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD17
4.2ЁЁЁЁГЌЩљВЈДЋИаЦїЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD17
4.3ЁЁЁЁКьЭтДЋИаЦїЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD19
ЕкЮхеТЁЁЬНВтЛњЦїШЫЕФгВМўЯЕЭГЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD20
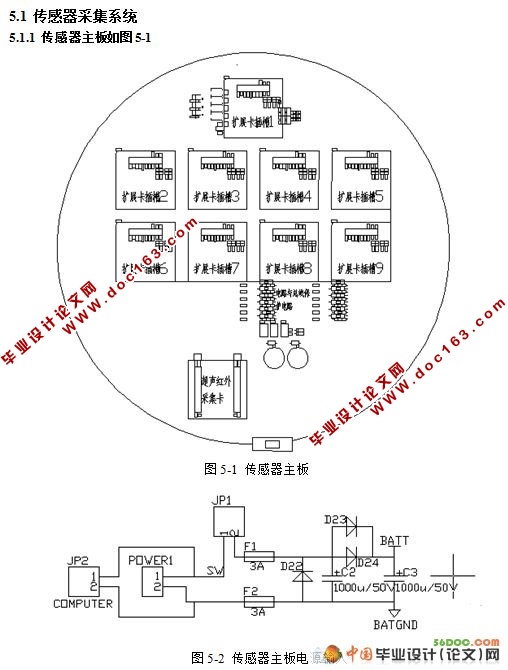
5.1 ДЋИаЦїВЩМЏЯЕЭГЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD20
5.2ЁЁЁЁБЃЛЄЕчТЗЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD20
5.3ЁЁЁЁКьЭтДЋИаЦїЕФНгЯпЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD21
5.4ЁЁЁЁГЌЩљВЈДЋИаЦїЕФНгЯпЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD21
5.5ЁЁЁЁТоХЬДІРэСїГЬЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD21
5.6ЁЁЁЁRS485-RS232зЊЛЛЕчТЗЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD22
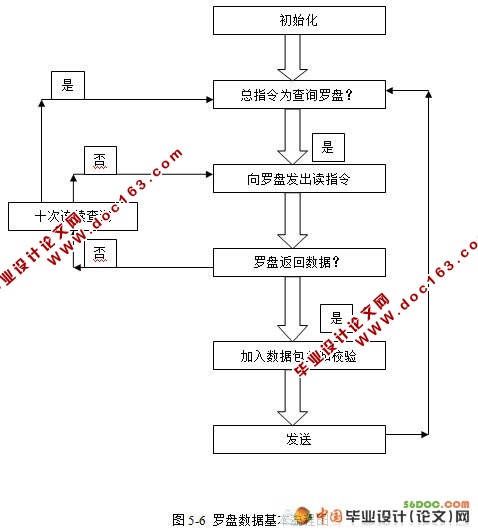
ЕкСљеТЁЁЬНВтЛњЦїШЫМЦЫуЛњгВМўЯЕЭГЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD23
6.1 ЮоЯпЕчЬЈЭЈбЖЯЕЭГЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD23
6.2ЁЁЁЁЕчзгТоХЬЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD23
ЕкЦпеТЁЁЬНВтЛњЦїШЫШэМўЯЕЭГЕФПЊЗЂЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD25
вЦЖЏПижЦЯЕЭГЕФЩшМЦЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD25
бнЪОПижЦГЬађЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD25
НсЪјгяЁЁЁЁЁЁЁЁЁЁЁЁЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD29
ВЮПМЮФЯзЁЁЁЁЁЁЁЁЁЁЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈDЈD30
[зЪСЯРДдДЃКhttp://doc163.com]