
基于MATLAB的交流异步电动机串级调速控制系统的设计(含原理图)
基于MATLAB的交流异步电动机串级调速控制系统的设计(含原理图)(开题报告,外文翻译,中期报告,论文说明书10000字,原理图,SIMULINK)
摘 要
本文主要讨论的是绕线式异步电动机串级调速控制系统的基本原理和实现方法。绕线式异步电动机串级调速系统,属于馈送型的调速系统,在交流调速技术的发展史中,它是结构简单、发展较快、应用较广的一种控制系统。其基本原理是利用不可控的整流电路将转子电动势转成直流电动势,再利用工作在逆变状态的三相可控整流电路来获得一个可调的直流电压作为附加电动势,通过改变该附加电动势,以实现转速的调节。
绕线式异步电动机双闭环串级调速控制系统的设计主要包括主电路设计、控制电路设计、保护电路设计以及MATLAB仿真。其中主电路的设计包括不可控整流电路、可控整流电路以及逆变变压器的设计;控制电路的设计主要是电流调节器和转速调节器的双闭环控制系统的设计。考虑到系统运行时可能出现的问题,相应的设计了系统的保护电路。同时,为了使设计的系统具有直观的静、动态性能,用MATLAB对系统进行了仿真。
关键词:绕线式异步电动机;串级调速系统;双闭环控制系统;MATLAB仿真。
The design of basing on MATLAB AC induction motor Cascade Speed control system [资料来源:http://doc163.com]
Abstract
This paper mainly discusses the basic principle and the implementation methods of wound rotor induction motor cascade speed control system. wound rotor induction motor cascade speed control system is a speed control system of fed type. In the development of China’s AC speed technology, it is a system of simple structure, faster development and wilder application. The basic principle of the system is using a rectifier circuit which can not be controlled to change the rotor alternating electromotive force into a DC electromotive force. Then, using a Three-phase controlled rectifier circuit which are working in the inverter status to obtain an adjustable DC voltage. The obtained DC voltage acts as an additional electromotive force. After, we change the additional electromotive force to achieve an adjustable speed.
The design of wound rotor induction motor double-loop cascade speed control system includes the main circuit design, the control circuit design, the protection circuit design and MATLAB simulation. The design of the main circuit includes the uncontrolled rectifier circuit design, the controlled rectifier design and the inverter transformer design. The design of control circuit is mainly the double-loop control system design of Current regulator and Speed regulator. Taking into account the possible problems when the system is running, syetem have designed the Protection circuit. Moreover, in order to obtain an intuitive static and dynamic performance, The system uses MATLAB simulation .
[来源:http://Doc163.com]
Keywords : Wound rotor asynchronous motor; Cascade control system; Double-loop control system; Matlab simulink .
系统设计的技术参数
电动机的铭牌参数:
型号:YR355M1-4 接法:定子 /转子Y
空载转数: =1500r/min 过载倍数: ;
功率因素: =0. 额定效率: 93.0%
定子电压: =380V 定子电流: =297A
转子额定线电压: =301V 转子额定电流: =325
额定功率: =160kw 转动惯量:
额定转数/最低转速: =1485r/min/
[资料来源:www.doc163.com]




[资料来源:https://www.doc163.com]
目 录
摘要 I
Abstract II
绪 论 1
第一章 串级调速系统的基本原理 3
1.1串级调速控制系统的工作原理 3
1.2系统设计的技术参数 5
1.3系统设计任务 6
第二章 主电路的设计和计算 7
2.1设计思路 7
2.2电动机参数的计算 8
2.3逆变变压器的选择和计算 9
2.4转子整流器的选择和计算 11
2.5可控硅元件的选择和计算 12
2.6等效直流电路总阻抗和总电感的计算 13
第三章 主电路的保护电路设计 15
3.1过电压保护 15
3.1.1交流侧过电压保护 15
3.1.2直流侧过电压保护 17
3.1.3晶闸管两端的过电压保护 18
3.2过电流保护 19
3.3过载保护 20 [资料来源:http://Doc163.com]
3.4缺相保护 20
第四章 控制电路的设计 22
4.1设计思路 22
4.2基本原理 22
4.3控制系统的动态结构图 23
4.4控制电路的参数计算 23
4.4.1静态参数的计算 23
4.4.2电流环的设计及计算 25
4.4.3转速环的设计与调节器参数的选择 28
第五章 MATLAB仿真 30
5.1控制系统仿真模型的建立 30
5.2仿真结果及其分析 31
结 论 37
参考文献 39
感 谢 40
附录一 绕线式异步电动机串级调速控制系统主电路图 41
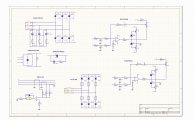
附录二 绕线式异步电动机串级调速控制系统控制电路图 42
[版权所有:http://DOC163.com]