
���ڻ����Ӿ��ĺ�������⼼���о�(��C++����ϵͳ)��
1.����ע���¼,֧��������ʾ�������ɻ�ȡ������.
2.��������ҳ���ܵ�Ϊ,���غ���ˮӡ.����ѧϰ�ο�֮��.
�� �� �� ��������
ժ Ҫ
��������ӹ�ҵ��չѸ�٣���Ϊ���ӹ�ҵ�Ļ�����Ʒ�������Ӿ�����Ҳ��Ӧ��չ�Ͽ졣��ͳ�����Ӿ����溸���ⷽ���ܴ�̶��������˹����������ļ�ⷽ�����������ص���ս������Ҫ�����ڼ��ʱ�䳤���ɱ��ߣ����Ч�����á���˿���һ�ּ���ٶȿ졢�����ɱ��͵ĺ���ҩͲ�������ں����������������ֳ���ϵͳ���кܴ����ʵ�����ʵ�ü�ֵ��
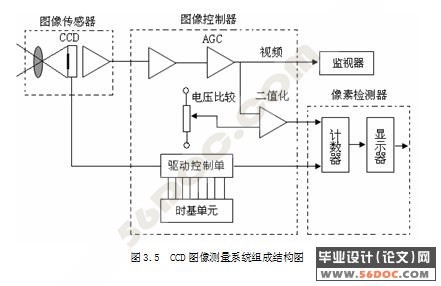
��������ļ������⣬���������Ӿ����溸��������ʵ�е�Ҫ���������һ�ּ���ٶȿ졢�����ɱ��͵ĺ���ҩͲ�������ں����������������ֳ���ϵͳ���������ϵͳ�Ĺ���ԭ����: ������ϵͳ�������£�������ѧ��ͷ����������CCD�ĵ��������ԣ���ҩͲ���ڱ��滷���������CCDоƬ�ϣ�ת��Ϊ��Ƶ�źţ�����ͼ��ɼ������͵��������
��������˻����Ӿ����溸����������о��Ͳ���ʵ�鹤�������ҽ�����ϵͳ �ĵ��ԡ�
�ؼ��ʣ�����ҩͲ;����ת��;CCD�����
Based on machine vision weld face examination engineering research
Abstract
In recent years the electronics industry development is rapid, takes the electronics industry the foundation product, the machine vision technology corresponding development is also quick. The tradition machine vision surface weld examination method depends upon the man-power to a great extent, this backward examination method is facing the serious challenge. This mainly displays in the examination time is long, the cost is high, the examination effect is not good. Therefore develops one kind of examination speed to be quick, in the simplicity of operator cost low welding medicine case link welded joint the weld face quality detection digit imaging system has the very big practical significance and the use value. [������Դ��www.doc163.com]
In view of the above technical question, the analytic engine vision surface weld examination in the reality request, interrogated designs one kind of examination speed to be quick, in simplicity of operator cost low welding medicine case link welded joint weld face quality detection digit imaging system. The whole testing system is the working principle: the lighting in the lighting system, the optical lens, using the CCD array of charge-coupled, the cartridge of the inner surface of Weld Central in the CCD imaging chip, into a video signal, after images Acquisition card sent to the computer.
This article has completed the machine vision surface weld examination fundamental research and the part experimental work, and has carried on system's debugging.
Key words: Welding cartridge; Optical balance; CCD camera
������ݼ�Ҫ��
��1��������������ܽ����������Ӿ���������⼼�����о��ķ�չ��״��
��2������ѧϰpicasso SDK�ɼ������ϣ���Ϥ�ɼ��������� [������Դ��http://www.doc163.com]
��3��ѧϰ����ͼ�����������ջ���ͼ�������㷨��
��4����Visual C++ 6.0���߿����Ӿ�����ϵͳ��
��5��д���ģ�
��6�������������ص��������ϡ�
���ڻ����Ӿ����溸�������ϵͳ
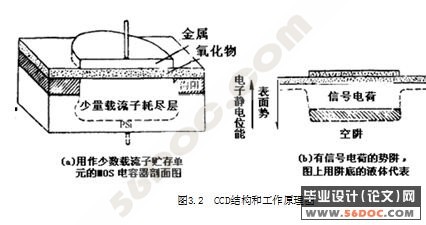
��ϵͳ��һ�ֺ���ҩͲ�������ں����������������ֳ���ϵͳ����CCD�Ӿ����ϵͳ��һ�ַǽӴ������ֶΡ����ǽ��ӳ���ϵͳ��õ�ͼ���źű��CCD�ĵ���źţ���ɶ�ͼ��Ŀռ���ɢ�����̣�ͬʱ��CCD�����ϲ���PAL�������ͬ���źš���ͬ���źź���Ӱ�źţ��ϳ���������Ƶ�źţ�������ɼ���������ķ�����ϵͳ�ɹ�ѧϵͳ����������ϵͳ������ϵͳ����ѧ����ϵͳ��������CCD����ϵͳ��ͼ��ɼ�����������ӿڼ����������ɡ�
��¼A ���ֳ���˵��
��1��ͼ����ǿ——ֱ��ͼ�ij���
void CCh1_1View::OnViewIntensity()
{
// �鿴��ǰͼ��Ҷ�ֱ��ͼ
// ��ȡ�ĵ�
CCh1_1Doc* pDoc = GetDocument();
// ָ��DIB��ָ��
LPSTR lpDIB;
// ָ��DIB����ָ�� [��Ȩ���У�http://DOC163.com]
LPSTR lpDIBBits;
// ����DIB
lpDIB = (LPSTR) ::GlobalLock((HGLOBAL) pDoc->GetHDIB());
// �ҵ�DIBͼ��������ʼλ��
lpDIBBits = ::FindDIBBits(lpDIB);
// �ж��Ƿ���8-bppλͼ������Ϊ�˷��㣬ֻ����8-bppλͼ�������Ŀ������ƣ�
if (::DIBNumColors(lpDIB) != 256)
{
// ��ʾ�û�
MessageBox("Ŀǰֻ֧�ֲ鿴256ɫλͼ�Ҷ�ֱ��ͼ��", "ϵͳ��ʾ" , MB_ICONINFORMATION | MB_OK);
// �������
::GlobalUnlock((HGLOBAL) pDoc->GetHDIB());
// ����
return;
}
// ���Ĺ����״
BeginWaitCursor(); [������Դ��http://doc163.com]
// �����Ի���
CDlgIntensity dlgPara;
// ��ʼ������ֵ
dlgPara.m_lpDIBBits = lpDIBBits;
dlgPara.m_lWidth = ::DIBWidth(lpDIB);
dlgPara.m_lHeight = ::DIBHeight(lpDIB);
dlgPara.m_iLowGray = 0;
[������Դ��https://www.doc163.com]
Ŀ ¼ 18000��
ժ Ҫ I [������Դ��http://Doc163.com]
Abstract II
Ŀ ¼ III
1 ���� 1
1.1 �����Ŀ�ļ����� 1
1.2 �����ⷢչ����״ 2
2 �����Ӿ���� 4
2.1 �����Ӿ����� 4
2.2 �����Ӿ����ԭ�� 5
2.3 �����Ӿ�ϵͳ�ĵ��ͽṹ 6
2.4 �����Ӿ�ϵͳ���ŵ� 7
3 ��������� 8
3.1 ������������� 8
3.2 CCDͼ���� 8
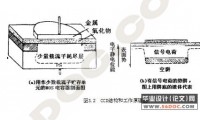
3.2.1 CCDͼ�����Ļ���ԭ�����ṹ 9
3.2.2 CCDͼ�����ķ��� 12
3.2.3 CCDͼ�������ŵ� 12
3.3 CCDͼ������CMOS������ 13
3.3.1 CCD��CMOS�Ķ��� 13
3.3.2 CCD��CMOS������ 13
[������Դ��http://www.doc163.com]
3.4 CCD�������ϵͳ 14
3.4.1 CCD�������ϵͳ����� 15
3.4.2 CCD��������Ļ���ԭ�� 17
4 ���ڻ����Ӿ����溸�������ϵͳ 17
4.1 ���ڻ����Ӿ����溸�������ϵͳ�������ͼ 18
4.2 ���ڻ����Ӿ����溸�������ϵͳ�Ĺ�ѧϵͳ 18
4.2.1 ���ڻ����Ӿ����溸�������ϵͳ�Ĺ�ѧϵͳ�Ĺ��� 18
4.2.2 ���쵲�塢��Դ��CCD������������ 19
4.3 ���ڻ����Ӿ����溸�������ϵͳ�Ĺ���ԭ�� 21
4.4 ���ڻ����Ӿ����溸�������ϵͳ��ͼ��ɼ�����ѡ�ü���ʹ�� 21
4.5 ���ڻ����Ӿ����溸�������ϵͳ��ͼ���� 21
4.5.1 ͼ����������ֵ�˲���ͼ���䄻���ֱ��ͼ����ؽ��� 22
4.5.2 ���쵲�塢��Դ��CCD������������ 23
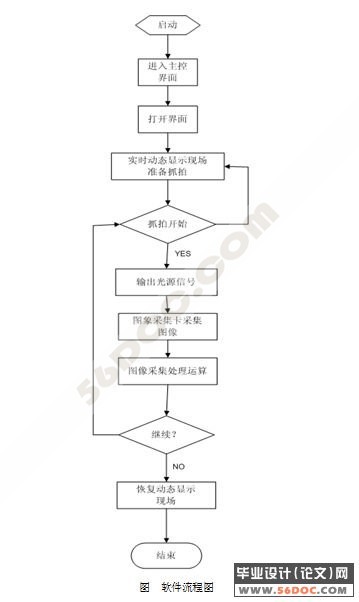
4.6 ���ڻ����Ӿ����溸�������ϵͳ����������ͼ 24 [������Դ��Doc163.com]
5 ����PICASSO��SDK�Ľӿڳ��� 26
5.1 picasso SDK����Ҫ�������� 26
5.1.1 Picasso SDK 26
5.1.2 Picasso SDK���÷� 26
5.1.3 ����Picasso SDK�IJ��輰��Ҫ�������� 26
5.2 ͼ��ɼ��Ĺ������̼������������ 30
5.2.1 �ɼ�ͼ��IJ��� 30
5.2.2 ����������� 31
5.3 ͼ�����ʾ 32
5.4 �������� 32
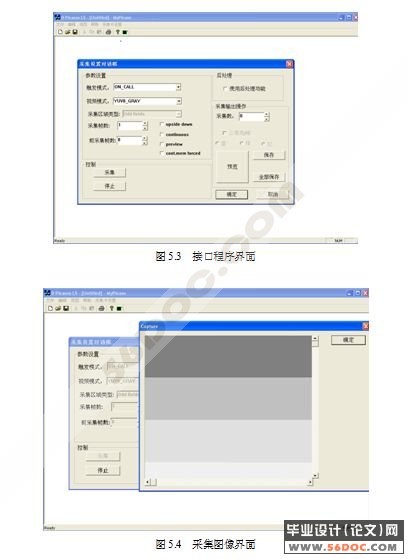
5.4.1 �ӿڳ������ 32
5.4.2 �ɼ�ͼ��ִ��Ԥ������ 33
�� �� 34
����� 35
��¼A ���ֳ���˵�� 37
�� л 47
[��Դ��http://Doc163.com]
��һƪ����������(PSD)��ʵ��(��MATLAB�������)��
��һƪ�����������������(����+PCBͼ+��·ͼ+����)��