
基于STM32和计算机视觉的四轴无人机遥控系统设计
基于STM32和计算机视觉的四轴无人机遥控系统设计(任务书,开题报告,论文13000字)
摘要
本文提出了一种使用STM32芯片构建的四轴无人机遥控模块,能够与PC进行双向无线通信。通过PC端上位机程序控制,无人机可以完成起飞、平动飞行、转向等飞行任务。结合本文设计的基于OpenCV的图像处理算法,上位机可遥控无人机完成自动降落任务。相较于传统无人机人为操作遥控器的控制方式,本文提出的遥控系统不仅可以兼容传统操作方式,还能够切换至程控飞行方式,使得无人机操作更加精准安全,为同时控制多架无人机提供了可能。论文研究所得结果对于无人机操控方式的改进、应用领域的拓展具有重要的指导意义。论文主要研究了无人机无线遥控模块的设计、相应嵌入式程序和指令集的开发、图像处理算法的设计。
研究结果表明:使用无线遥控模块可以完成无人机和PC端上位机软件间的数据、指令传输;图像处理算法则能为无人机控制软件提供降落坐标,引导无人机自动降落。
关键词:四轴无人机;STM32;图像处理;自动着陆
Abstract
This thesis proposes a four-axis UAV remote control module built using STM32 microcontroller, which can communicate wirelessly with PC. Through the PC host computer program control, the drone can complete the take-off, translation flight, steering and other flight missions. Combined with the OpenCV-based image processing algorithm, the host computer can remotely control the drone to complete the automatic landing task. Compared with the traditional remote control system of the UAV, the remote control system proposed in this paper can not only be compatible with the traditional operation mode, but also can be switched to the program-controlled flight mode, making the drone operation more precise and safe, and controlling multiple UAVs at the same time possible. The results obtained in the thesis have important guiding significance for the improvement of the drone control mode and the development of the application field. The thesis mainly studies the design of the wireless remote control module of the drone, the development of the corresponding embedded program and instruction set, and the design of the image processing algorithm.
[资料来源:www.doc163.com]
The research results show that the data and command transmission between the UAV and the PC-side PC software can be completed by using the wireless remote control module. The image processing algorithm can provide the landing coordinates for the UAV control software and guide the UAV to automatically land.
Key Words:four-axis unmanned aerial vehicle;STM32; image processing;automatic landing
[资料来源:Doc163.com]

目 录
第1章绪论 1
1.1研究背景 1
1.2研究意义 2
1.3国内外研究现状 2
第2章系统配置 4
2.1硬件配置 4
2.1.1无人机 4 [资料来源:http://Doc163.com]
2.1.2着陆标志 5
2.2开发环境 5
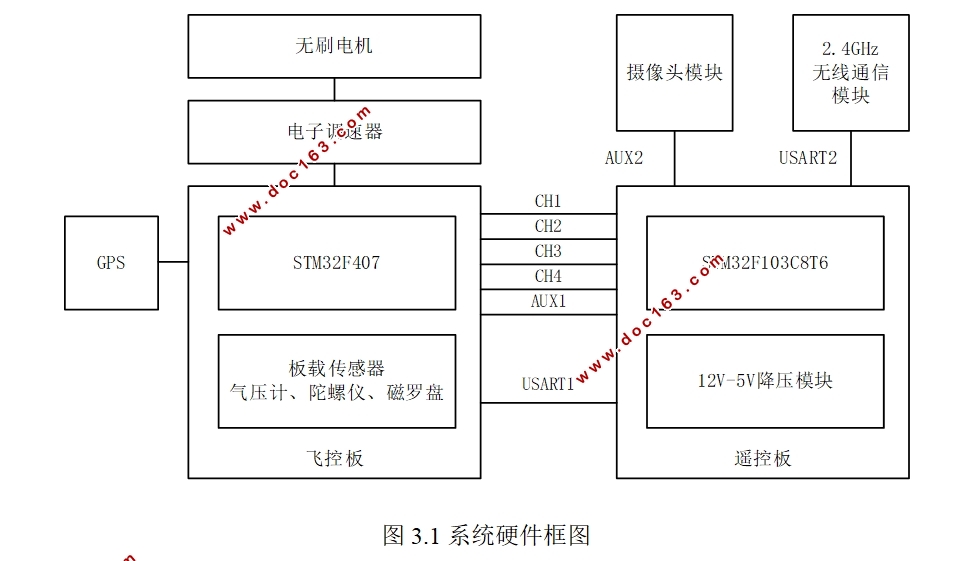
第3章基于STM32的无线遥控模块 7
3.1硬件设计 7
3.2嵌入式程序设计 9
3.2.1控制信号发生器与响应函数 9
3.2.2通信协议设计与解析 12
3.2.3上位机界面设计 12
第4章基于OpenCV的图像处理算法 14
4.1图像采集与预处理 14
4.1.1相机标定与畸变矫正 14
4.1.2图像预处理 15
4.2轮廓检测与目标识别 16
4.3算法移植与整合 17
第5章总结与展望 19
5.1基本飞行指令 19
5.2视觉引导降落 19
5.3 结论 20
参考文献 21
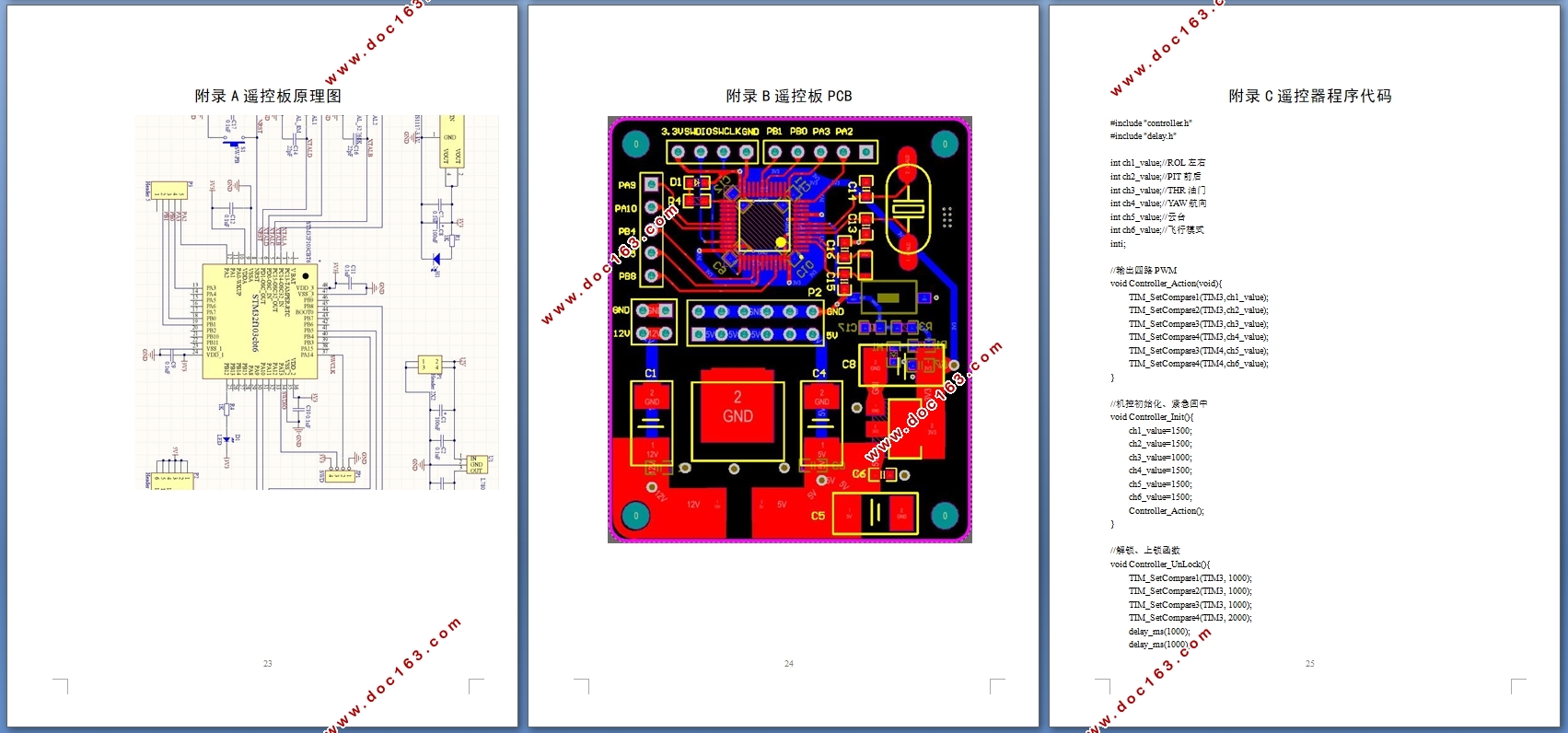
附录A 遥控板原理图 23
附录B 遥控板PCB 24
附录C 遥控器程序代码 25
附录D 图像识别代码 28
[资料来源:https://www.doc163.com]
致谢 31 [资料来源:https://www.doc163.com]