
基于FPGA的防撞系统设计
基于FPGA的防撞系统设计(任务书,开题报告,论文说明书13000字)
摘 要
生活中的撞击摩擦时有出现,因此防撞系统成为汽车的配有部分。目前,超声波测距系统在市场上普遍存在,因为该系统可以测量较远的距离,也因为可以实现很多功能、便宜又便利。系统需要发生器产生驱动信号,而最常见的成本低单片机却难以实现较好测量准确度。具有运行速度快、自由编辑器件等功能的PGA作为一种高密度可编程器件,提供了一种新的方案。因此,本文基于FPGA设计了倒车防撞系统。超声波测距是防撞系统设计的核心,进一步重要的是超声波信号的接收和发射两个部分。本文在软件设计中,利用FPGA的高速性对全局时钟信号的频率进行了划分,并通过频率计数法精确测量超声波传输的传输时间,提高了系统的可靠性,提高了系统的测距精度。
关键词:FPGA;防撞系统;超声波测距
Design of Reversing Anti-collision System Based on FPGA
ABSTRACT
Collision and friction often occur in life, so the anti-collision system has become an integral part of the car. At present, the ultrasonic ranging system is ubiquitous in the market, because the system can measure a long distance, but also because it can achieve many functions, cheap and convenient. The system needs a generator to generate driving signals, but the most common low-cost single-chip computer is difficult to achieve better measurement accuracy. As a kind of high density programmable device, PGA, which has the functions of fast running speed and free editing device, provides a new scheme. Therefore, this paper designs a backing anti-collision system based on FPGA. Ultrasound ranging is the core of anti-collision system design. What is more important is the receiving and transmitting of ultrasonic signals. In the software design, the frequency of the global clock signal is divided by the high speed of the FPGA, and the transmission time of the ultrasonic transmission is measured accurately by the frequency counting method, which improves the reliability of the system and the ranging accuracy of the system.
[资料来源:https://www.doc163.com]
Keywords:FPGA ; Collision avoidance system ; Ultrasonic ranging
[来源:http://Doc163.com]

目录
Design of Reversing Anti-collision System Based on FPGA 2
ABSTRACT 2
第一章 绪论 1
1.1 本课题的背景意义 1
1.2 本课题的当前发展 2
1.3 论文主要内容 3
1.4 论文结构安排 3
第二章 防撞系统的总体设计 4 [资料来源:www.doc163.com]
2.1总体设计方案选择 4
2.2系统方案及器件选择 5
2.2.1测距的选择 5
2.2.2显示器件的选择 7
2.2.3报警器的选择 7
第三章 防撞系统的模块设计 9
3.1 系统设计思路 9
图3.1 防撞系统结构框图 9
3.2 时钟模块和复位按键 9
3.3 分频模块 10
3.4 测距模块 11
3.5 距离计算模块 12
3.6 显示模块 13
3.7 距离判断模块 16
3.8 报警模块 17
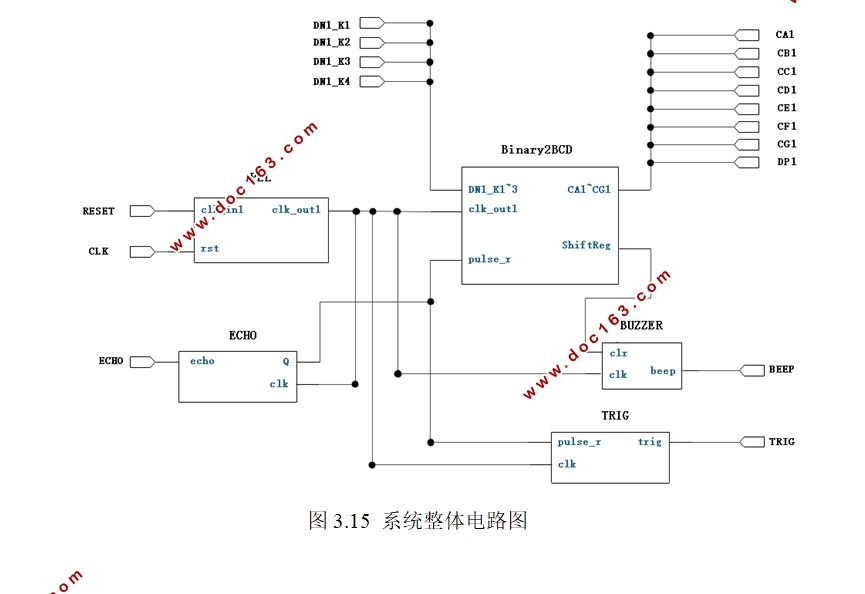
3.9 系统整体电路 17
第四章 系统仿真和测试 19
4.1 模块仿真 19
4.2实物测试 20
4.3 问题与解决的方法 23
第五章 论文总结 24
参考文献 25
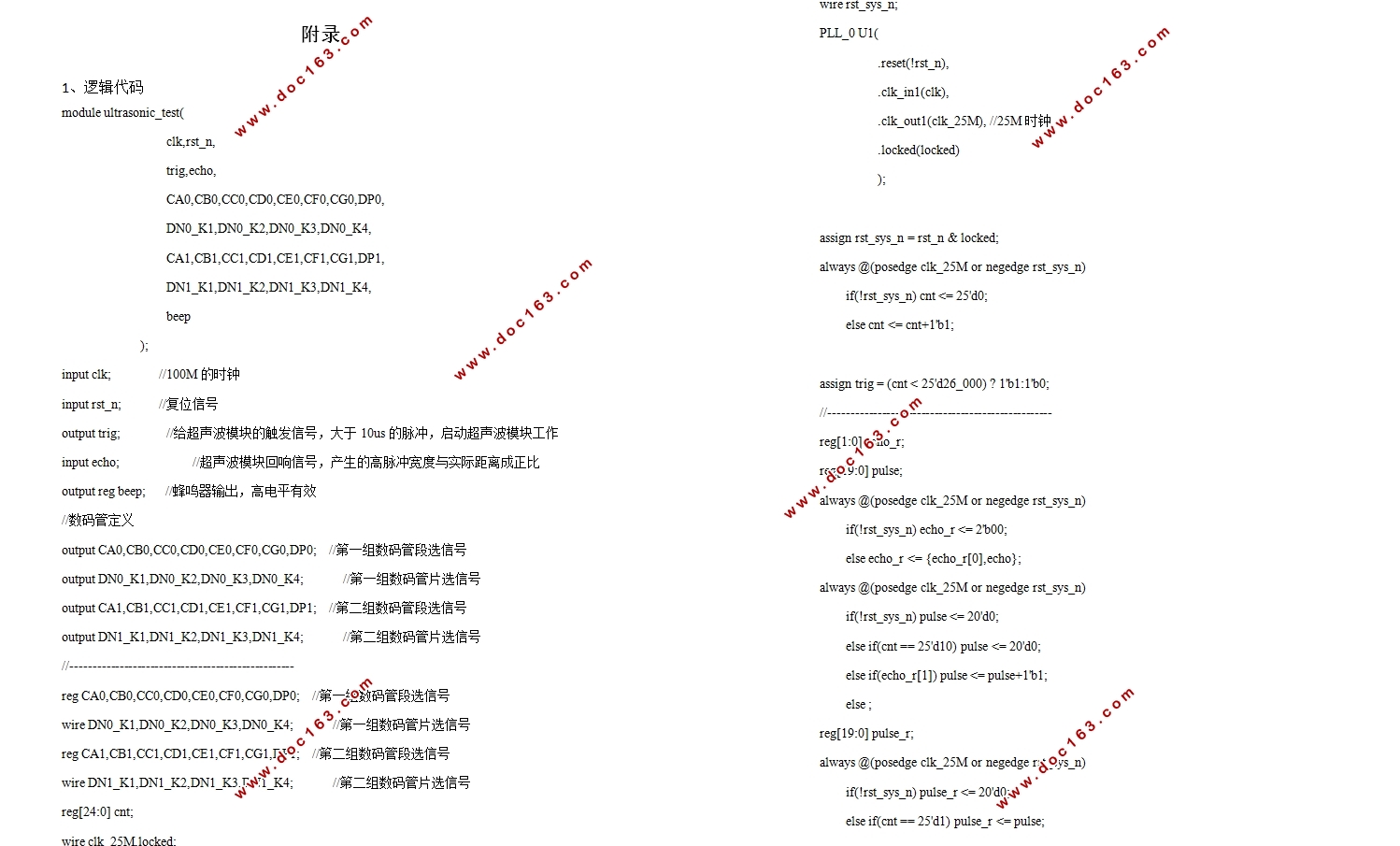
附录 27
致谢 44 [资料来源:http://Doc163.com]