
基于红外线传感器的智能小车设计

基于红外线传感器的智能小车设计(论文13000字)
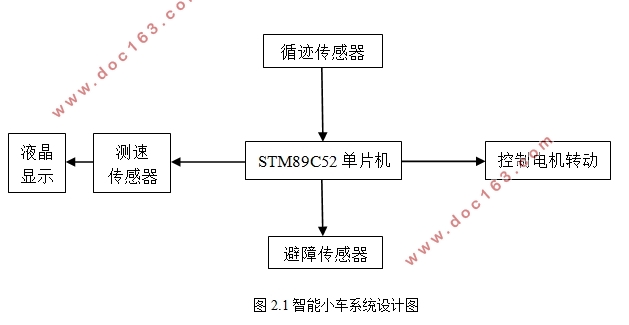
摘要:随着科技的进步,现如今智能车的开发与设计已经有了很大的发展,智能车技术在生活中的应用也越来越常见。本设计就是基于当代社会的需求,对智能车的循迹和绕障的功能进行研究。本智能小车采用STC89C52为控制芯片;采用反射型光电探测器RPR220作为黑线循迹的传感器;采用红外避障传感器作为绕障传感器模块;采用对射式光电传感器和测速码盘作为测速模块。本文详细介绍了智能小车实现循迹和绕障功能的过程,从开始的采用何种传感器方案的论述,之后介绍智能小车的硬件搭建,最后介绍了智能小车的程序编写思路与流程。本设计的重点就是循迹和绕障功能的实现,在设计完成时最终完整的完成了这个既定任务,论证了本设计的绕障功能可以实现。
关键词:智能小车;循迹;绕障;测速
The design of intelligent vehicle based on ultrasonic and infrared sensors
Abstract:With the progress of science and technology, the development and design of intelligentvehicle has been greatly developed, and the application of smart vehicle technology in life isbecoming more and more common. This design is based on the needs of the contemporarysociety, researchingthe intelligent vehicle’s function of tracking and bypassing obstacle. This smart caruses STC89C52 as the control chip;using the reflection type photoelectric detector RPR220 as black line tracking; infrared obstacle avoidance sensor as the obstacle avoiding sensor module;using the photoelectric sensor and speed encoder as the velocity measurement module. This paperintroduces theprocess of realizing intelligent vehicle tracking and obstacle avoiding function, from the beginning of the sensor scheme is discussed, after the introduction of the smartcar hardware, this paper introduced the smart car’sthe idea of program and process. The focus of this design is to achieve the function of tracking and bypassing obstacle, the design is completed whenthe final complete this task, we demonstrated the design ofbypassing obstacle can be achieved. [资料来源:Doc163.com]
Key word:Intelligent car; Tracking; Bypassing obstacle; velocity measurement
[来源:http://www.doc163.com]
目 录
1.绪论 1
1.1引言 1
1.2国内外研究现状 1
1.3研究内容与目标 2
2.智能小车设计方案 2
2.1行驶轨迹的设计 3
2.2循迹方案的选定 3
2.3绕障方案的选定 3
2.4系统整体设计方案 4
3.智能小车硬件设计 5
3.1设计概述 5
3.2 STC89C52单片机介绍 5
3.3 LDC393(低功率低失调电压双比较器)简介 8
3.4 红外循迹传感器模块 8
3.5 红外避障传感器模块 9
3.6测速传感器模块 11
4.智能小车软件设计 13
[资料来源:http://doc163.com]
4.1设计概述 13
4.2编译软件Keil介绍 14
4.3循迹程序设计 14
4.4绕障程序设计 16
4.5测速程序设计 19
4.6 PMW调速程序设计 20
5.总体调试及实物展示 22
参考文献 25
致谢 27
[资料来源:www.doc163.com]