
基于单片机的自动扫地机设计(含原理图,程序)

基于单片机的自动扫地机设计(含原理图,程序)(课题申报表,任务书,开题报告,中期检查表,外文翻译,论文13600字,程序,答辩PPT)
摘 要
近年来,随着社会的发展需要,清洁机器人已经渗透到了我们的生活、工作和经济方面,并且起到了很大的作用。
本文首先介绍了一款清洁机器人—自动扫地机的设计过程。扫地机以ST89C52型单片机为核心,利用ST89C52型单片机的集成度高、可靠性好、功能强、运行速度快等优点,进行了设计和制作。自动扫地机整体结构设计包括内部结构设计(控制核心)和外部结构设计(外观),其中内部结构设计以单片机为控制系统,包括激励电机正反转驱动电路部分、正、反转显示部分、按键部分及避障部分等。外部结构设计包括外观设计、整体构造设计等。通过52单片机对普通直流电机的起始、停止、顺时针旋转、逆时针旋转的控制实现小车运行状态的变化。同时,结合单片机PWM的电机变速功能,实现滚刷的速度可调,使设计更加完善。
关键词:自动扫地机;单片机;避障
Abstract
In recent years, with the development of society, the cleaning robot has infiltrated our lives, work and the economy, and has played a significant role. Research and the development of the cleaning robot has a lot of influence on our economic development.
[资料来源:http://Doc163.com]
This article mainly introduces a cleaning robot--the design process. A new detonating system controlled by ST89C52 microcontroller, control system is designed according to the STC89C52 basic characteristic of high integrated level, good reliability, powerful function, fast running speed. Automatic sweeping machine of overall structure is including the design of internal structure and external structure, internal structure and control system are depended on microcontroller, including motor driving circuit, key part and obstacle avoidance. The external structure is including the design of External structure and overall structure. By using 52MCU ,we control the start and stop of the DC motor, clockwise and anti-clockwise to realize the changes of the car running states. At the same time, combining with the PWM of the MCU realizing the speed of roller is adjustable, making the design more perfect.
Key words:Automatic sweeping machine; Microcontroller; Obstacle avoidance
本文研究的主要内容
[来源:http://Doc163.com]
总体方案是设计一个自动控制机器人,在一个平面结构的房间内运动,机器人能够自主移动、避障、遍历房间功能。尽快遍历房子的每一个角落,完成任务,这个工作受多个工作的影响,包括墙脚和家具等。在现实生活中的家用吸尘器机器人清理房间的过程中,利用了机器人自身的多传感系统、运动控制系统和自主蔽障系统。
本课题主要研究的内容有:以STC89C52单片机作为检测和控制核心,完成驱动系统和电机调速系统的设计,通过传感器电路知识的学习及应用和单片机控制技术以实现智能清扫机的自主避障功能。完成智能清扫机清扫转速的控制与显示。在各电路模块设计的基础上完成智能清扫机整个系统的设计,对智能清扫机体系中的重要环节进行实际调试。
自动扫地机系统构成
自动扫地机由5部分组成:系统主控制部分、执行电机部分、传感器部分、输入输出部分和电源部分。主控系统使用单片机AT89C51控制,包括红外遥控接收模块,对输入输出器件的操作,对执行电机的控制,以及对传感器的响应等。执行电机部分和小车避障扫地机器人的主要构成部分。行走结构采用轮式结构,圆形壳体,底盘为三轮电动小车,前面两轮由两个电机独立驱动,后轮为万向轮。清扫系统用电机带动清扫刷的转动,清扫灰尘并将灰尘集中于吸风口处,由吸尘机构制造强大的吸力将灰尘吸入灰尘存储箱中。在清扫吸尘之后,利用安装在壳体下面的清洁布擦除残留在地面上的细小灰尘。轮子电机、吸尘电机和毛刷电机使用的都是无刷直流电机;传感器部分即检测子系统,主要为了保障机器人能够安全地工作;输入输出部分包括遥控子系统和显示子系统,能够较好地实现人机交互的功能;电源部分采用可充电锂电池。 [资料来源:http://doc163.com]
[资料来源:https://www.doc163.com]


[资料来源:https://www.doc163.com]
目 录
第1章 绪论 1
1.1 课题的研究背景和意义 1
1.2 自动扫地机发展现状 1
1.3 本文研究的主要内容 3
第2章 自动扫地机方案论证 4
2.1 自动扫地机总体设计 4
2.2 各模块分析选择 4
2.3 本章小结 5
第3章 硬件设计 6
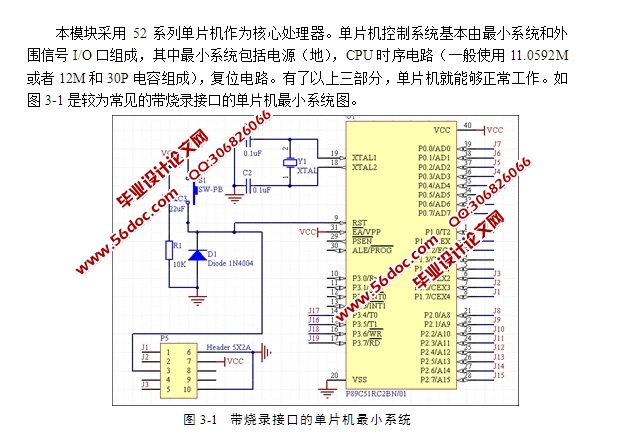
3.1 单片机控制模块 6
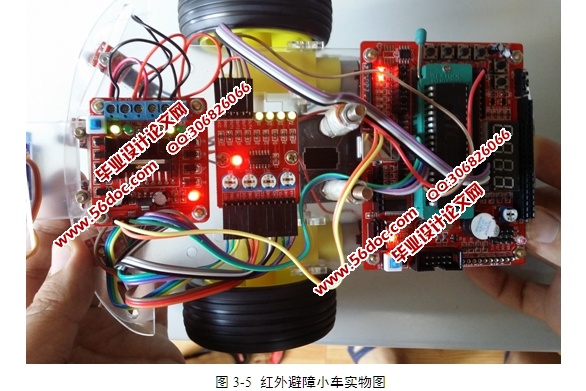
3.2 红外避障模块 8
3.3 电机驱动模块 9 [来源:http://Doc163.com]
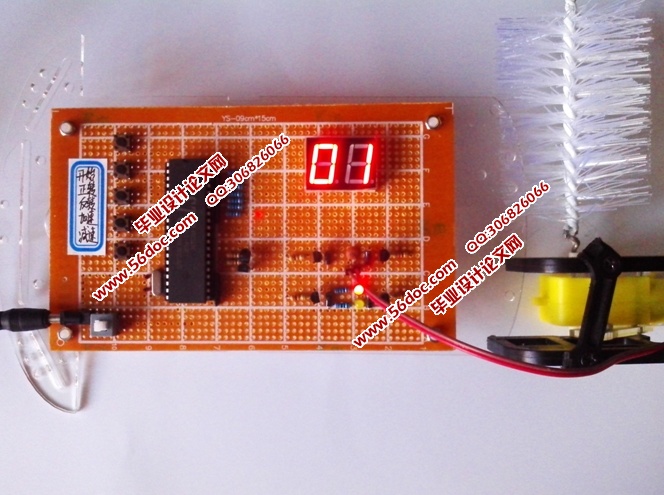
3.4 可调速电机清扫模块 10
3.5 本章小结 14
第4章 软件设计 15
4.1 软件设计框图 15
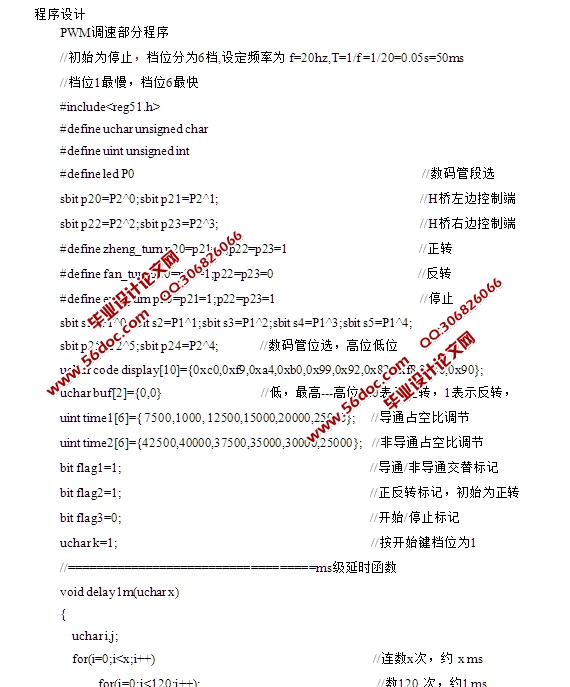
4.2 可调速滚刷设计 16
4.3 本章小结 17
第5章 系统安装和功能调试 18
5.1 编程软件介绍 18
5.2 软件调试 18
5.3 硬件调试 22
5.4 本章小结 24
结 论 25
参考文献 26
致 谢 28
附 录 29
[资料来源:https://www.doc163.com]
下一篇:基于单片机的动液面监测系统设计(含电路原理图,程序)