
关于新型并联雕刻机的研究及其关键技术
资料介绍:
中文译文
关于新型并联雕刻机的研究及其关键技术(中文9700,英文6900字)
摘要:为了弥补传统雕刻机的缺点,以及发挥并联机构的优势,在这篇文章中对并联雕刻机的一些关键技术进行了研究。机制的表现方面,首先在第一和第二阶影响系数矩阵里得到了分析。所以机制的大小,应该更有利于运动学和运动学机制的所有性能指标。这样才可以得到确认。而在过去,由于只考虑一阶影响系数矩阵而没有被通过,从而被束缚住。因此,拥有更好性能的新型雕刻机的理论依据设计机制大小被提供。此外,刀具路径规划方法和控制技术的雕刻力在这篇文章中也将得到研究。该算法在理论上可以应用到任意曲面刀具路径规划及空间曲面雕刻力,基于模糊神经网络(FNN)的控制技术已经适应了不断变化的环境。研究基于B / S架构的并行远程操作雕刻机,解决的关键问题,如控制模式,共享机制,多用户,实时控制雕刻作业和用于视频信息的实时传输。仿真结果进一步的可行性和所提出的方法的实用性。
关键词:并联机构,雕刻机,影响系数,性能指标,刀具路径规划,力控制,模糊神经网络,远程操作。
英文原文
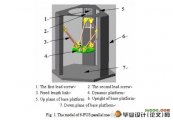
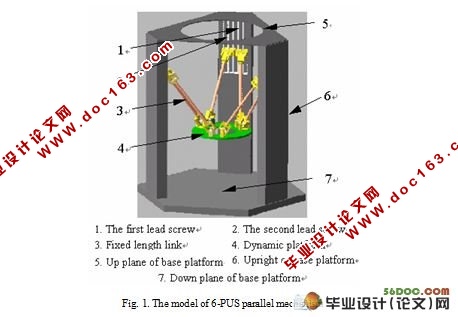
Research on a Novel Parallel Engraving Machine
and its Key Technologies
[资料来源:www.doc163.com]
Abstract: In order to compensate the disadvantages of conventional engraving machine and exert the advantages of parallel mechanism, a novel parallel engraving machine is presented and some key technologies are studied in this paper. Mechanism performances are analyzed in terms of the first and the second order influence coefficient matrix firstly. So the sizes of mechanism, which are better for all the performance indices of both kinematics and dynamics, can be confirmed and the restriction due to considering only the first order influence coefficient matrix in the past is broken through. Therefore, the theory basis for designing the mechanism size of novel engraving machine with better performances is provided. In addition, method for tool path planning and control technology for engraving force is also studied in the paper. The proposed algorithm for tool path planning on curved surface can be applied to arbitrary spacial curved surface in theory, control technology for engraving force based on fuzzy neural network (FNN) has well adaptability to the changing environment. Research on teleoperation for parallel engraving machine based on B / S architecture resolves the key problems such as control mode, sharing mechanism for multiuser, real-time control for engraving job and real-time transmission for video information. Simulation results further show the feasibility and validity of the proposed methods.
[资料来源:http://www.doc163.com]
Keywords: parallel mechanism, engraving machine, influence coefficient, performance indices, tool path planning, force control, fuzzy neural network, teleoperation
[资料来源:http://www.doc163.com]
[资料来源:https://www.doc163.com]