
水下运载工具的仿真建模

资料介绍:
水下运载工具的仿真建模(中文5900字,英文PDF)
摘要:这篇论文中我们得到一个非线性模型的模型设计新AUV波尔图大学数值系数。这是用理论和实证方法还通过采取类似的水下已知结果。我们通过替换传感器和执行器接口使用派生模型在MVS,模拟器嵌入在循环的控制软件中。
索引词——水下运载器、建模、仿真
一 介绍
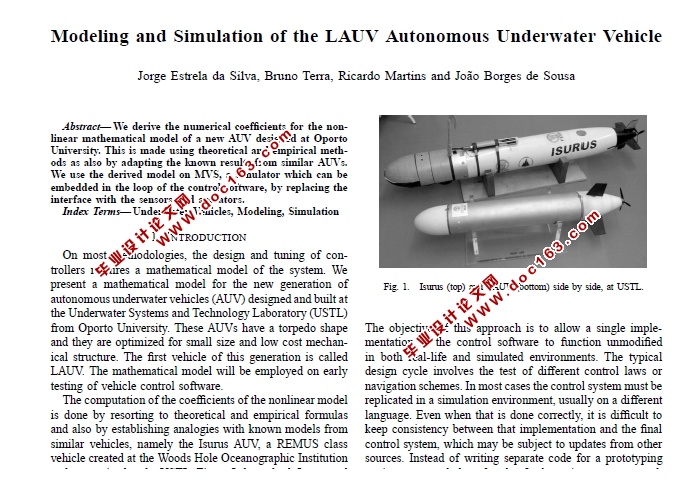
新(AUV)设计并建立在水下系统和技术实验室(USTL),在波尔图大学是一个小型鱼雷形状的车辆优化成一个低成本的机械结构。第一个模型被称为LAUV。它将被用来测试新的控制和软件件方法,不关注灾难性故障对货币的影响。
[来源:http://www.doc163.com]
[资料来源:http://doc163.com]