
设计和开发一个竞争低成本四自由度机器人手臂

资料介绍:
设计和开发一个竞争低成本四自由度机器人手臂(中文5100字,英文PDF)
作者:Ashraf Elfasakhany,Eduardo Yanez,Karen Baylon,Ricardo Salgado
文摘:
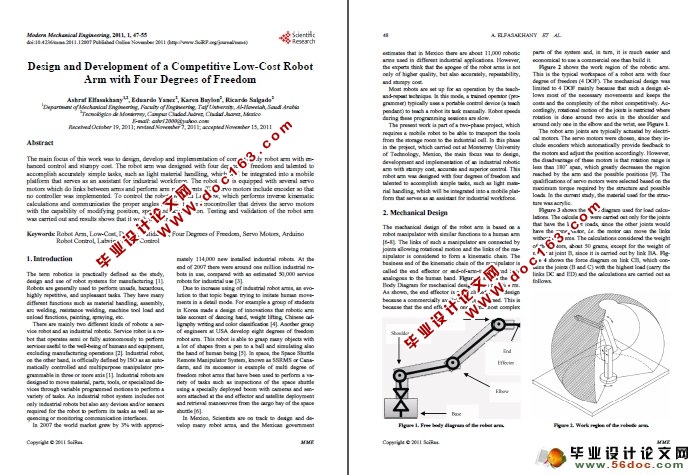
这项工作的主要焦点是设计、开发和实施低成本、强控制、有竞争力的机器人手臂。设计四自由度和才华横溢的机器人手臂尽快实现精确简单的任务,如光材料处理,这将被集成到一个移动平台,作为一个助理工业的劳动力。机器人手臂配备有伺服电机来做手臂之间的联系和执行手臂的动作。伺服电机包括编码器,以至于没有控制器实现。我们控制机器人使用的虚拟仪器,它执行逆运动学计算和串行通信的适当的角度对一个单片机,驱动伺服电机的功能修改位置、速度和加速度。测试和验证的机器人手臂结果显示它正常工作。
关键词:
机器人手臂,低成本,设计,验证,四自由度,伺服马达,Arduino机器人控制,虚拟仪器机器人控制
[资料来源:http://Doc163.com]
[资料来源:https://www.doc163.com]