
多轴汽车电液辅助转向系统设计(含CAD零件图装配图,CATIA三维图)
多轴汽车电液辅助转向系统设计(含CAD零件图装配图,CATIA三维图)(任务书,开题报告,文献摘要,论文说明书12200字,CAD图5张,CATIA三维图)
摘 要
本文主要针对重型多轴汽车在转向时轮胎磨损严重的问题设计了一套电控液压辅助转向系统,该系统能够在全轮转向情况下控制每个车轮的转角使其满足阿卡曼原理,减小轮胎的磨损;设计了一套模糊控制算法,根据车速和转向盘上的转矩来控制每个车轮的转角使其在低速转向或急转弯时转向轻便,在高速转向时操纵稳定性良好,提高驾驶性能。
关键词: 多轴转向;电液辅助;模糊控制;梯形机构
Abstract
In this paper, a set of electronically controlled hydraulic steering system was designed for heavy multi-axle vehicles for its serious wearing of tires during steering. This system could control the steering angle of each wheel to meet the Akaman principle in all-wheel steering situations to decrease the wearing of tires; A set of fuzzy control algorithm was designed to control the steering angle of each wheel according to the vehicle speed and the torque on the steering wheel so as to make it steer light at low speed steering or sharp turning, and has good steering stability at high speed when steering. Improved driving performance.
[资料来源:http://www.doc163.com]
Keywords: Multi-axle steering;Electrical and hydraulic assistance;Fuzzy control;
Trapezoidal mechanism
2.1转向系统计算载荷的确定
转向系统的每个部件都应具有必要的强度以确保驾驶安全。为此,我们需要校核转向系统部件的强度,以确定每个部件的受力。转向系统的阻力包括车轮围绕主销旋转时的阻力,车轮的稳定阻力,轮胎的变形阻力以及转向系统中存在的内部摩擦阻力。
半经验公式用于计算汽车在沥青路面或混凝土路面上的原位转向阻力矩Mr,即:
(2.1)
式中:Mr—转向阻力矩,N.mm;
f—轮胎和路面见得摩擦因数,一般取0.7;
G1—转向轴负荷,N;
p—轮胎气压,MPa;
经计算可得Mr=10507.51N.mm。
[资料来源:www.doc163.com]


 [资料来源:http://www.doc163.com]
[资料来源:http://www.doc163.com] 




目录
第1章 绪论 1
1.1国内外研究现状分析 1
1.2转向系统的介绍 1
第2章 转向系统的设计与计算 3
2.1转向系统计算载荷的确定 3
2.2机械式转向器方案设计 3
2.2.1齿轮齿条式转向器介绍 3
2.2.2循环球式转向器介绍 3
2.2.3循环球式转向器设计 4
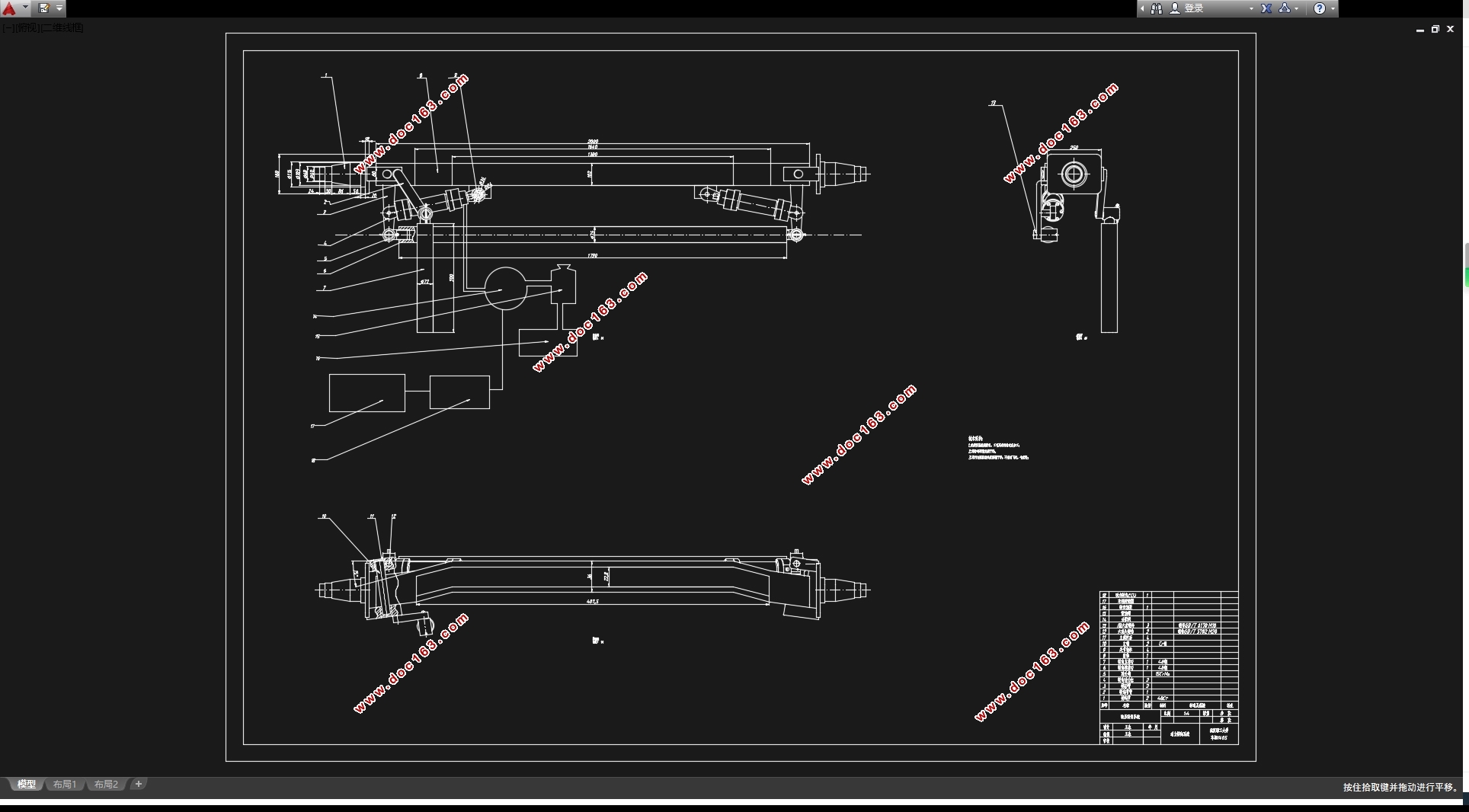
2.3转向桥的主要零件尺寸确定 9
2.3.1前梁的设计 9
2.3.2前梁的强度计算 10
2.3.3.主销强度计算 12
2.3.4转向节强度计算 13
2.4转向梯形机构设计 14
2.4.1转向摇臂的设计 15
2.4.2转向横拉杆的设计 16
2.4.3转向直拉杆的设计 16
2.4.4转向节的设计 16
2.4.5球头销的设计 16
2.6本章小结 17
第3章 动力转向系统设计 18
3.1对动力转向系统的要求 18
3.2液压式动力转向机构布置方案分析 18
3.2.1动力转向机构布置方案的选择 18
3.2.2分配阀的结构方案选择 19
3.3液压式动力转向机构的计算 20
3.3.1转向动力缸主要尺寸的计算 20
3.3.2分配阀参数的选择 21
3.4电控液压动力转向机构 22
3.4.1电控液压助力转向机构的分类 23 [来源:http://www.doc163.com]
3.4.2流量控制式电控液压助力转向机构 23
3.4.3油压反馈控制式电控液压助力转向机构 23
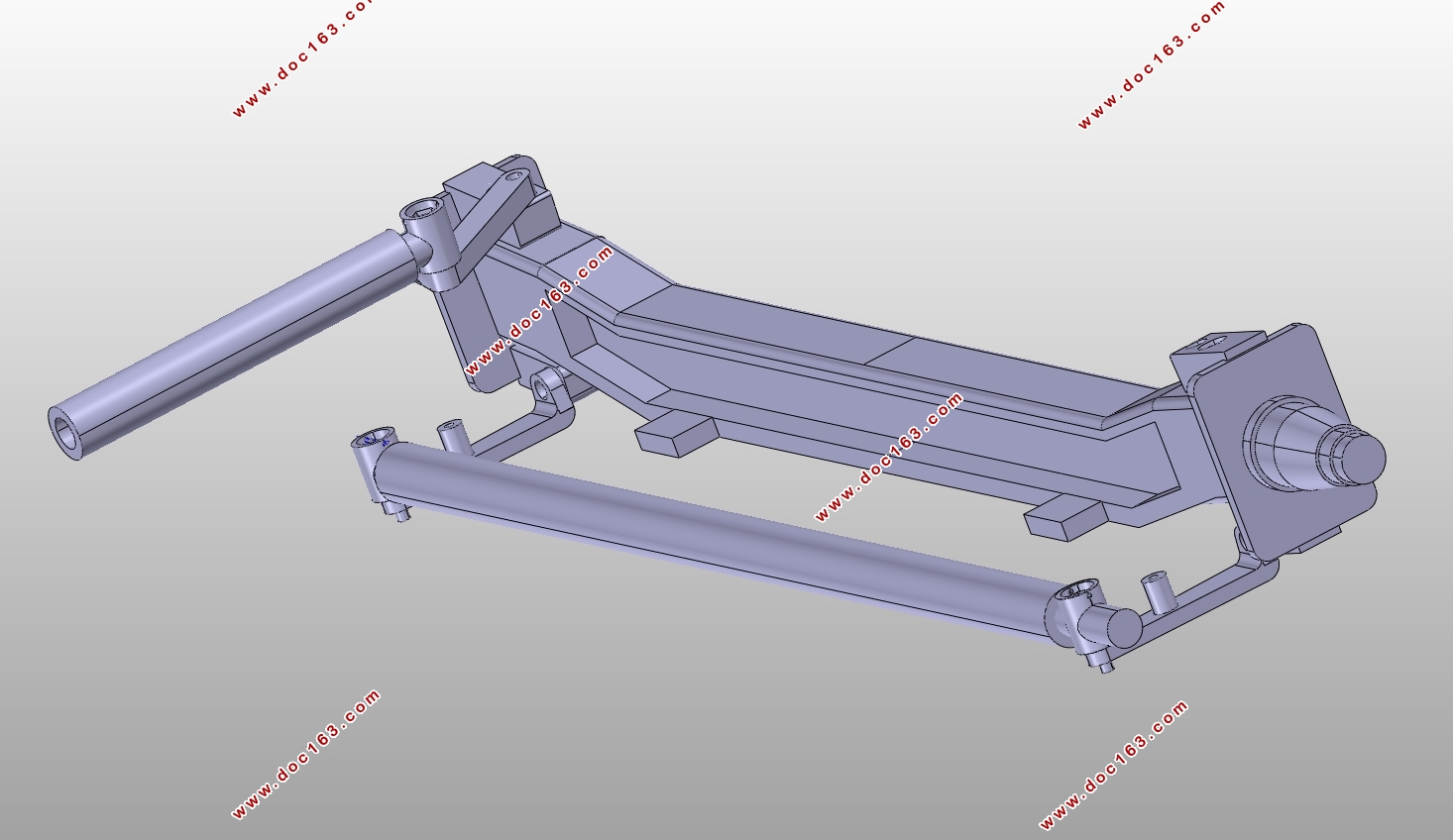
3.5转向机构的建模 23
3.5.1CATIA的简介 24
3.5.2在CATIA中建立的转向机构的模型 24
3.6本章小结 26
第4章 电控液压辅助转向系统的建模与仿真 28
4.1MATLAB 介绍 28
4.2电控液压助力曲线的设计 28
4.2.1各个变量的模糊化 28
4.2.2模糊控制的规则设计 30
4.2.3模糊控制法的特性曲线 30
4.2.4多轴转向的模型建立 32
4.3本章总结 37
5结论与展望 39
参考文献 40
致谢 41
[资料来源:http://doc163.com]
上一篇:E7Plus型纯电动公交车电动助力转向系统设计(含CAD零件装配图)